Claude Loullingen
Let no grass grow under your feet. You are what you create.
Let no grass grow under your feet. You are what you create.
Remote controlling a Kuka robot via serial interface
|
|
|
|
CREAD/CWRITE:
The escalation of expert programming is the remote controling. So that a robot can react dynamically to changing conditions, external sensors are required. Classically, this would be a camera system that can determine the position of an object to be gripped. This position must now be transmitted to the robot. At the KRC1 there is a serial interface available for this purpose. This topic is described in the document CREAD/CWRITE by Kuka. The following page should help with the implementation.
First steps:
We want to use the COM2 interface, which may be connected to the Interbus card on the VKRC1. As far as I understood this is done to configure the latter. If you are not using the Interbus or the card is already configured, you can disconnect it.

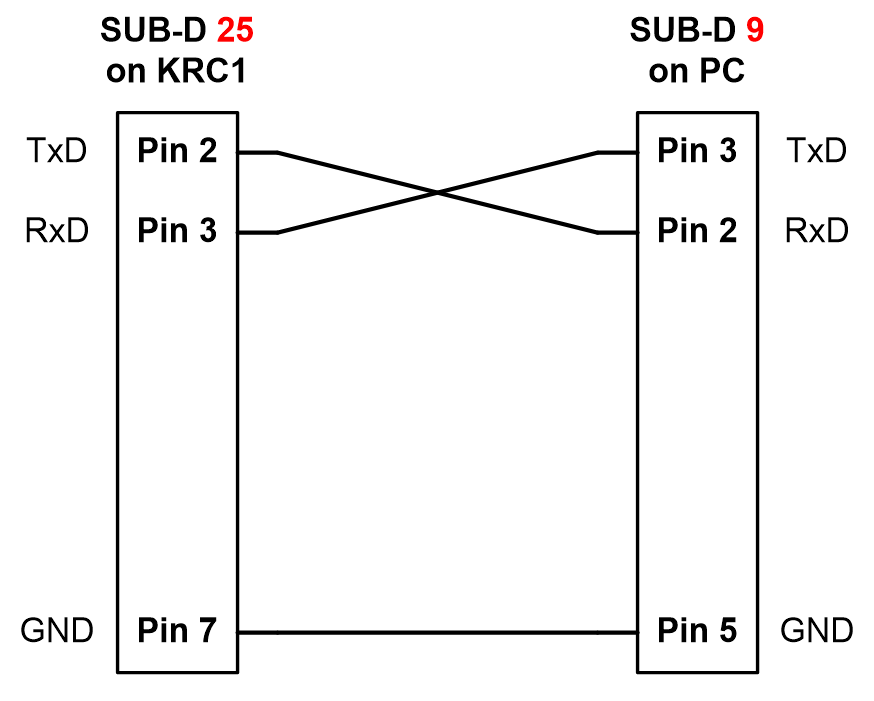
You may want to test the serial port on your KRC1 for proper operation first. Connect a PC to the COM2 port of the KRC1 using a null modem cable. The null modem cable requires at least three wires according to the following wiring diagram. RTS, CTS and DTR do not have to be used, DSR only if you have defined so in the SERIAL.INI.
Open now on the PC and on the KRC1 a terminal program like Hyperterminal, Putty or Hterm.
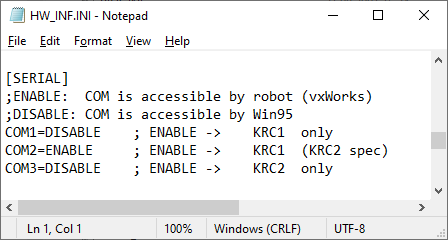
Make sure that in the file HW_INF.INI (path: C:\KRC\ROBOTER\INIT) COM2 is still DISABLE, otherwise only the Kuka software can access this serial interface.
To open the Hyperterminal on the KRC1, you have to switch to the expert mode (menu item Configuration/User group),
then deselect Numlock and open the Windows start menu with CTRL + ESC.
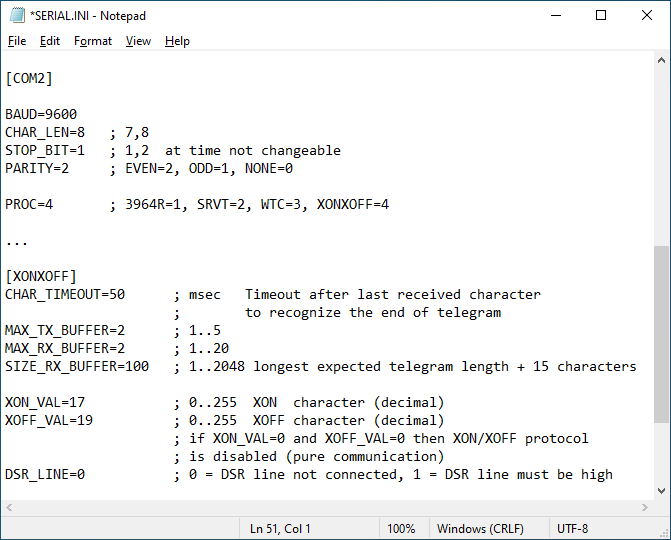
Search and open the Hyperterminal. Select the same parameters in both terminals. By default, Kuka is using:
- speed: 9600 Bit/s
- Number of databits: 8
- Number of stopbits: 1
- Parity bit: even
- Flow control: Xon / Xoff
If you have successfully configured both terminals, any characters you typed in one terminal program should now appear in the window of the other terminal. This ensures the functionality of the interface.
Configuration of the KRC1:
Now the files HW_INF.INI and SERIAL.INI (path: C:\KRC\ROBOTER\INIT) have to be adapted according to the document from Kuka. The file $CUSTOM.DAT (path: C:\KRC\ROBOTER\KRC\STEU\Mada) does not need to be adapted.
The protocol for data flow control in SERIAL.INI must be chosen with care. With the protocol 3964R, you will need to do a handshake before you can transfer data. Most terminal programs do not support this, so XON/XOFF is better suited for testing.
Disclaimer:
The present project requires specialist knowledge. Reproduction at your own risk and liability.
KRL Programm:
&ACCESS RVP
DEF serial_to_robot( )
;This program waits for a valid position being received at the COM2
interface and then moves the robot to that position.
;--------- Declaration ---------
DECL INT HANDLE, I, J, CREAD_OFFSET, ANSWER, NUMBER
DECL CHAR NOTIFY_TEXT[5], READ_STRING[20]
DECL REAL TIMEOUT, CHECKSUM, SUMCOORD
DECL STATE_T CWRITE_STATE, CREAD_STATE
DECL MODUS_T MODUS
DECL AXIS HOME
DECL POS PositionRobot
EXT BAS(BAS_COMMAND:IN, REAL:IN)
;---------- Initialization ---------
BAS(#INITMOV,0) ;Initialization of speed, acceleration and coordinate
system
$BASE = $WORLD ;setting the base to the world coordinate system (mandatory when using a frame)
$TOOL = $NULLFRAME ;setting the tool center point to the middle of the robot flange
HOME={AXIS: A1 0,A2 -90,A3 90,A4 0,A5 0,A6 0} ;set home position
CHECKSUM=0
SUMCOORD=0
I=1
FOR J = 1 to 6
$VEL_AXIS[J]=30 ;x% max. speed
$ACC_AXIS[J]=100 ;x% max. acceleration
ENDFOR
;---------------------------------------
; Main program
;---------------------------------------
;------------- Open channel to COM2 -----------
COPEN(:SER_2,HANDLE) ;Open a channel to COM2 according to config in
serial.ini. If XON/XOFF is used, then a XON symbol is sent by COPEN.
IF HANDLE==0 THEN ;If an error occured during opening the channel,
then stop the program.
HALT
ENDIF
MODUS=#SYNC
LOOP ;endless loop
;------------- Write to COM2 -----------
CWRITE(HANDLE,CWRITE_STATE,MODUS," ") ;Send a space to mark
the start of the loop.
CWRITE(HANDLE,CWRITE_STATE,MODUS,"%d",I) ;Send counter value
to track the loop.
;------------ Read from COM2 -----------
TIMEOUT=60.0
CREAD_OFFSET=0
MODUS=#ABS
CREAD(HANDLE,CREAD_STATE,MODUS,TIMEOUT,CREAD_OFFSET,"%f %f %f
%f %f %f %d %d %f",PositionRobot.X,PositionRobot.Y,PositionRobot.Z,PositionRobot.A,PositionRobot.B,PositionRobot.C,
PositionRobot.S,PositionRobot.T,CHECKSUM)
;Send for example the string "2000 -800 1800 -90 90 -90 2 10 2922"
to COM2. The last value is the sum of all previous values.
IF CREAD_STATE.RET1==#CMD_TIMEOUT THEN ;If the timeout time has been
exceeded, then exit the loop.
EXIT
ENDIF
NOTIFY_TEXT[] = " " ;clear variable
NOTIFY_TEXT[] = "X: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.X) ;NOTIFY_REAL is a subprogram
defined below
NOTIFY_TEXT[] = "Y: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.Y)
NOTIFY_TEXT[] = "Z: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.Z)
NOTIFY_TEXT[] = "A: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.A)
NOTIFY_TEXT[] = "B: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.B)
NOTIFY_TEXT[] = "C: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.C)
NOTIFY_TEXT[] = "S: "
NOTIFY_INT(NOTIFY_TEXT[],PositionRobot.S)
NOTIFY_TEXT[] = "T: "
NOTIFY_INT(NOTIFY_TEXT[],PositionRobot.T)
NOTIFY_TEXT[] = "CHK: "
NOTIFY_REAL(NOTIFY_TEXT[],CHECKSUM)
SUMCOORD=PositionRobot.X+PositionRobot.Y+PositionRobot.Z+PositionRobot.A+PositionRobot.B+
PositionRobot.C+PositionRobot.S+PositionRobot.T
NOTIFY_TEXT[] = "SUM: "
NOTIFY_REAL(NOTIFY_TEXT[],SUMCOORD)
IF PositionRobot.X==0 THEN ;Send the string "0" to COM2
to exit the loop.
EXIT
ENDIF
;---- Move robot to the read position ------
WAIT FOR $IN[16]==TRUE ;wait for an impulse on input 16 to trigger continuation
IF SUMCOORD==CHECKSUM THEN
PTP PositionRobot
ENDIF
I=I+1
CWRITE(HANDLE,CWRITE_STATE,MODUS,".") ;Send a dot to mark
the end of the loop.
ENDLOOP
WAIT FOR $IN[16]==TRUE ;wait for an impulse on input 16 to trigger
continuation
PTP HOME
CCLOSE(HANDLE,CWRITE_STATE) ;info: a XOFF is sent after closing
END
;---------------------------------------
; Sub programs
;---------------------------------------
;subprogram to display the value of a real variable
DEF NOTIFY_REAL(NOTIFY__TEXT[]:OUT,NUMBR:IN) ;char arrays must be called
by reference (OUT)
DECL CHAR CHARACTR, NOTIFY__TEXT[] ;index must be omitted here
DECL REAL NUMBR
DECL INT MSG_OFFSET
DECL MSG_T EMPTY_MSG
DECL STATE_T MSG_STATE
EMPTY_MSG={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] "
",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[]
" ",ANSWER 0}
$MSG_T=EMPTY_MSG
MSG_OFFSET=0
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,NOTIFY__TEXT[]) ;write MSG_OFFSET
into $MSG_T.KEY[]
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,"%f",NUMBR) ;add
the value of the real variable at the end of $MSG_T.KEY[]
$MSG_T.TYP=#NOTIFY ;set message typ
WAIT SEC 0.2 ;mandatory to solve a bug with unreleased status messages
$MSG_T.VALID=TRUE
WAIT SEC 0.2
END
;subprogram to display the value of an integer variable
DEF NOTIFY_INT(NOTIFY__TEXT[]:OUT,NUMBR:IN) ;char arrays must be called
by reference (OUT)
DECL CHAR NOTIFY__TEXT[] ;index must be omitted here
DECL INT NUMBR, MSG_OFFSET
DECL MSG_T EMPTY_MSG
DECL STATE_T MSG_STATE
EMPTY_MSG={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] "
",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[]
" ",ANSWER 0}
$MSG_T=EMPTY_MSG
MSG_OFFSET=0
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,NOTIFY__TEXT[]) ;write MSG_OFFSET
into $MSG_T.KEY[]
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,"%d",NUMBR) ;add
NUMBR at the end of $MSG_T.KEY[]
$MSG_T.TYP=#NOTIFY ;set message typ
WAIT SEC 0.2 ;mandatory to solve a bug with unreleased status messages
$MSG_T.VALID=TRUE
WAIT SEC 0.2
END
;subprogram to display a string
DEF NOTIFY_STR(NOTIFY__TEXT[]:OUT, READ_STR[]:OUT) ;char arrays must
be called by reference (OUT)
DECL CHAR NOTIFY__TEXT[],READ_STR[] ;index must be omitted here
DECL INT MSG_OFFSET
DECL MSG_T EMPTY_MSG
DECL STATE_T MSG_STATE
EMPTY_MSG={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] "
",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[]
" ",ANSWER 0}
$MSG_T=EMPTY_MSG
MSG_OFFSET=0
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,NOTIFY__TEXT[]) ;write MSG_OFFSET
into $MSG_T.KEY[]
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,READ_STR[]) ;add CHARACTR at
the end of $MSG_T.KEY[]
$MSG_T.TYP=#NOTIFY ;set message typ
WAIT SEC 0.2 ;mandatory to solve a bug with unreleased status messages
$MSG_T.VALID=TRUE
WAIT SEC 0.2
END
Download:
 |
|
| serial_to_robot.src | Kuka_CREAD-CWRITE.pdf |
© by Claude Loullingen