Claude Loullingen
Let no grass grow under your feet. You are what you create.
Let no grass grow under your feet. You are what you create.
Generate a KRL program from a Fusion 360 drawing
|
|
|
|
Project goal:
The goal of this project is to generate a KRL program from a Autodesk Fusion 360 drawing with a post-processor. A typical application would be for example engraving or pocket milling. Let's take for example the part below with an engraved logo.

Procedure:
- Create a 3D version of the workpiece in Fusion 360.
- Create a manufacturing process in Fusion 360.
- Generate the robot program with a post-processor in Fusion 360.
Create the 3D version of the workpiece in Fusion 360:
You can find here a good tutorial how to emboss a logo into a workpiece in Fusion 360. To convert your logo to the SVG file format you can use an online file converter. As an alternative to inserting a logo, you can also create a text in a sketch.
Create a manufacturing process in Fusion 360:
- Create a Setup
- Menu Manufacture/Setup/New Setup
- In the context menu choose Milling as Operation Type.
- Click on one of the Stock Points to fit the position and orientation of the WCS in Fusion 360 to the workpiece coordinate system you defined on the robot.
- Finish with OK button.
- Create a manufacturing process for 2D pockets
- Menu 2D/2D Pocket.
- Click on Select in the Tool Section. In the "Fusion 360 library" find and select with the help of the filters the milling tool we will use on the spindle motor.
- Choose for example "Plastics - Slotting " as a Feed & Speed preset.
- Switch to the "Geometry" tab in the context menu and click on all the bottom surfaces of all the pockets to be machined.
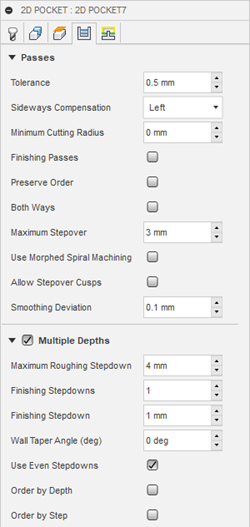
- Switch to the "Passes" tab and set according to the screenshot below. In principle, the higher the tolerance value, the fewer programme lines the later KRL programme will have.
- Finish with OK.
- You can now simulate the manufacturing process via menu Actions/Simulate/. Click the play icon at the bottom of the screen.
If everything worked fine, you should end up with something similar to this:
Generate the robot program with a post-processor in Fusion 360:
- Download and uncompress the post processor file.
- Adapt the lines 197 and 198 in the post processor to select the workpiece and tool coordinate system you have defined on the controller.
- Adapt the rotation offsets in the lines 57 to 59 in case the orientation of the tool coordinate system is different from the orientation of the workpiece coordinate system.
- In Fusion 360 open the post processor menu under Actions / Post Process. Under "Post" import and select the downloaded post processor file. Click the Post button to generate the KRL program for the robot. Once done go back to Actions / Post Process to open the output folder with the created file. Change the filename such, that it does not start with a digit, as the KRC1 robot controller cannot manage filenames starting with a digit.
- If you are using a KRC1 controller you will need to split the generated program into subprograms with approximately 1000 lines as the memory of the KRC1 controller is pretty limited compared to today's standards. You can call all subprograms from one main program so that the robot acts just like it would be one program.
Additional source of information:
You can also find a post processor and a guide at the site of Autodesk. Click there on the word "Download" to download the post-processor and on the word "Guide" to download a PDF with instructions.
Result:

© by Claude Loullingen