Claude Loullingen
Nutze die Zeit. Du bist, was du erschaffst.
Nutze die Zeit. Du bist, was du erschaffst.
Projekte
2024
2023
2022
2021
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
- elektronischer Thermostat
- Mag Charger
- eBib
- 3D-Modell in Google Earth
- Laptopnetzteil
- Blaulichtblitzer
- Defibrillator
- miniLEO
- File sharing in Windows XP
- Meine eigene Homepage
2008
2007
2005
2004
2003
2000
1999
1998
1995
1988
Kuka Industrieroboter VKR 200/2 mit Steuerung VKR C1 in Betrieb nehmen
|
|
|
|
Intro:
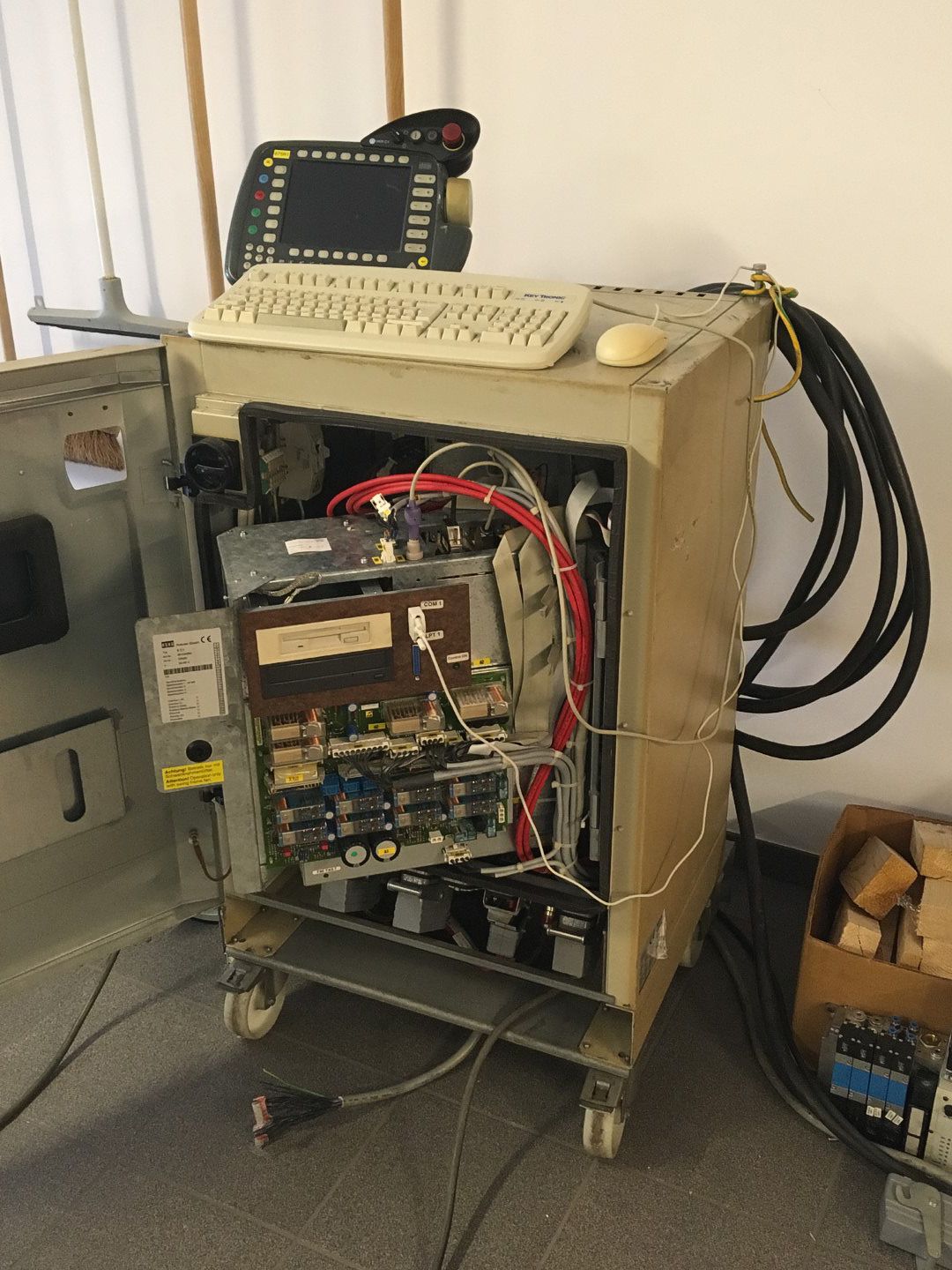
2019 hatte ich die Möglichkeit einen 20 Jahre alten Industrieroboter (VKR 200/2) von Kuka samt Steuerung (VKR C1), Programmierhandgerät (KCP1), einem Universalgreifer (Schunk PGN+125/1AS) und einer Ventilinsel (Festo type 03/04 mit Interbus Busknoten) bei der Firma Leonidis Demontage für ~1500€ zu erwerben.

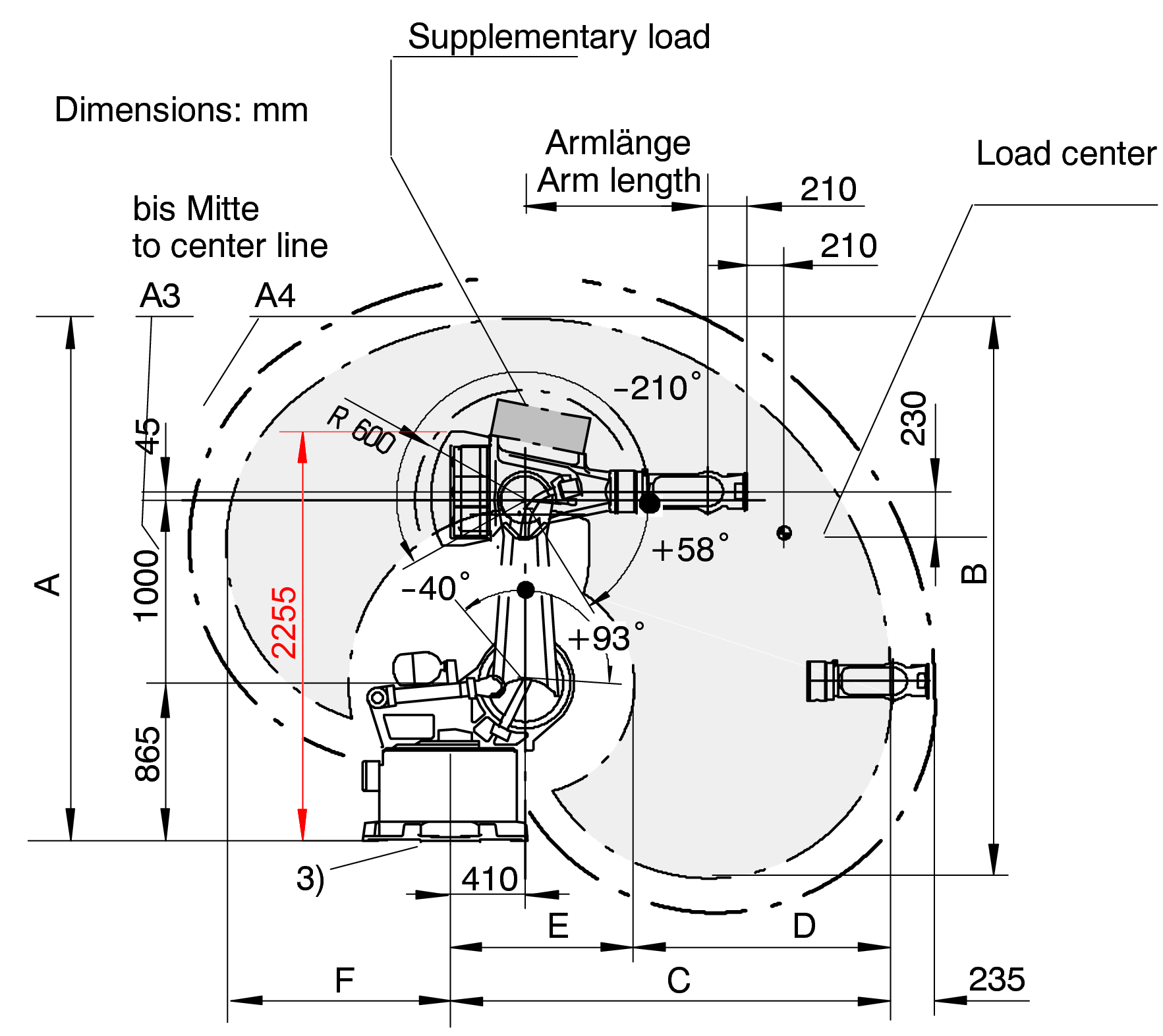
Der Roboter kann bis zu 200kg tragen und hat dennoch eine Wiederholgenauigkeit von 0,3 mm. Prinzipiell entspricht der VKR 200 einem KR 200 der an die Bedürfnisse der Volkswagensgruppe angepasst wurde. Das V steht also für Volkswagen. Gleiches gilt für die Steuerung VKR C1.
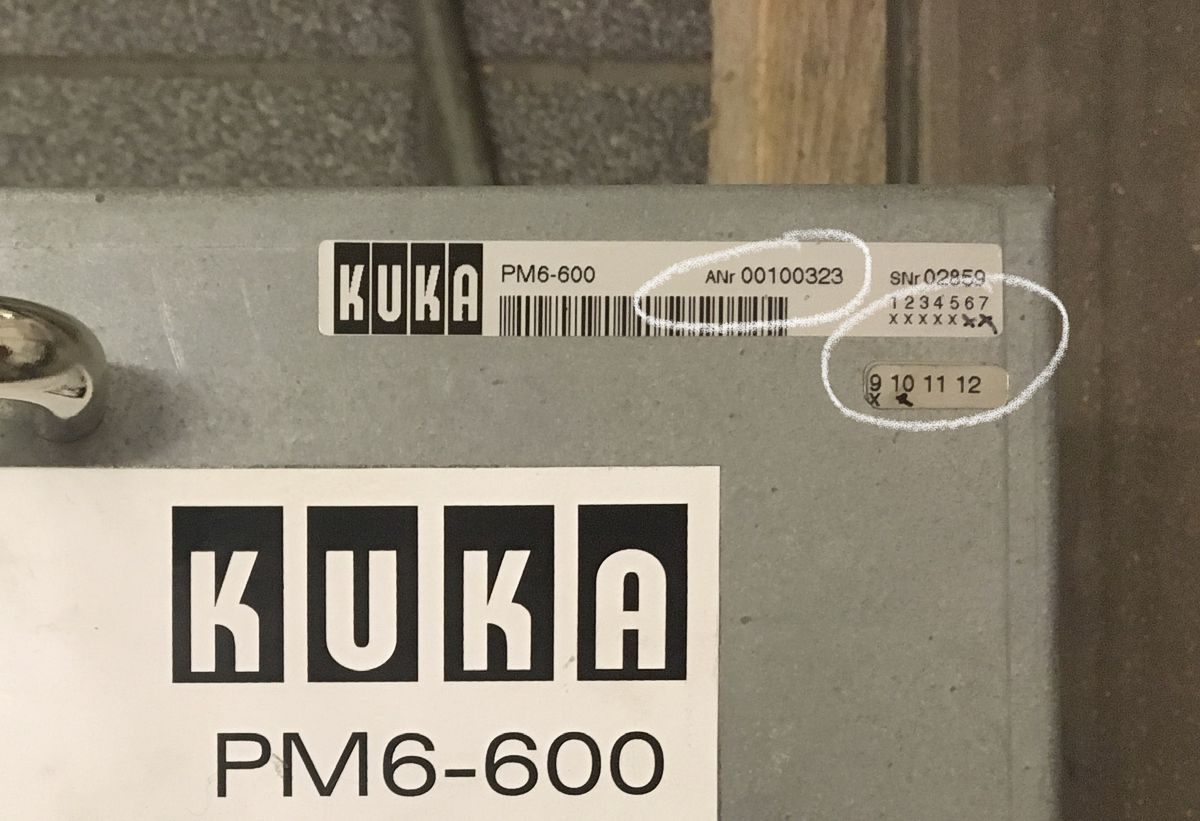
Beim Kauf einer KRC1 solltet ihr auf die Artikelnummer des Leistungsmoduls PM6-600 im Inneren der Steuerung achten. Chronoglisch gab es wohl folgende Artikelnummern: 71-039-278, 00-100-323 und 00-103-494. Von der ersten wäre abzuraten. Die zweite sollte mindestens Revision 9 haben um zuverlässig zu sein. Die Revision ist mit den x'en unter der Seriennummer markiert. Händisch eingetragene Kreuze symbolisieren ein nachträgliches Upgrade, aber das kann man natürlich leicht vortäuschen.
Wichtig zu wissen ist auch, dass der Betriebsartenwahlschalter am KCP, auch Schlüsselschalter genannt, bei VW nur zwei Positionen hat (Automatik extern und Handbetrieb), statt der üblichen 4 Modi (T1, T2, Automatik, Automatik extern). Durch entsprechendes Beschalten der Eingänge, siehe unten, kann man zwar wählen ob im Handbetrieb der Modus T1 oder T2 erfolgt, aber den normalen Automatikmodus kann man meines Wissens, auch mit allem Herumgelöten am KCP, bei der VKRC1 nicht realisieren.
Wie der externe Automatik–Modus anzusteuern ist, könnt ihr hier nachlesen. In der Zwischenzeit zurück zu den Grundlagen.
Die VKR C1 oder KR C1 enthält einen Industrie-PC auf Windows 95 Basis (Spezialversion für Kuka).
Hierauf läuft die eigentliche Kuka-Software. Die graphische Ausgabe erfolgt standardmäßig auf das
Programmierhandgerät.
Über eine Ein-/Ausgabekarte mit ISA-Interface wird die Verbindung zur Ansteuerelektronik für die Servomotoren hergestellt.
Da der Funktionsumfang der VKR C1 im Vergleich zur KR C1 reduziert ist, wird im Folgenden beschrieben wie man die VKR C1 Steuerung aus dem Dornröschenschlaf holt und in eine KR C1 umwandelt.
Schritte vor Inbetriebnahme:
- Spannungsversorgung herstellen. Die VKR C1 kommt mit einem 32A CEE-Drehstromstecker. Abgesichert werden muss die Steuerung aber nur mit 16A. Die Stromversorgung des Roboters muss laut Unterlagen bauseits mittels FI-Schutzschalter mit 300 mA Auslösestrom abgesichert sein weil die klassischen 30 mA FIs zu empfindlich sind. Was aber nicht in den Unterlagen steht ist, dass der RCD selektiv sein muss, also etwas träger als normal FIs, denn nach dem Einschalten fließt kurzzeitig ein etwas höherer Fehlerstrom. Deshalb habe ich einen Hager CPA440D Typ S verbaut.
- VKR C1 über X20 Kabel mit Roboter verbinden. (VKRC-Schnittstellen)
- VKR C1 über X21 Kabel (Robot-DATA) mit Roboter verbinden.
- VKR C1 über X19 Kabel mit KCP (Kuka Control Panel) verbinden.
- Die zwei Gel-Akkus überprüfen und gegebenenfalls ersetzen. Diese sind unter anderem nötig um den PC kontrolliert herunterzufahren, da die Steuerung standardmäßig über den Hauptschalter heruntergefahren wird und die Akkus die letzten Schreibvorgänge puffern. Ohne funktionsfähige Akkus ist eine Justage des Roboters sinnlos, da die Ergebnisse nicht dauerhaft gespeichert werden.
- Entsprechend dem Robotertyp sind die Servomotoren jeweils mit dem Medium-Voltage oder dem Low-Voltage
Ausgang der Steuereinheit PM6-600 zu verbinden.
Beim VKR 200/2 sind alle 6 Motoren mit Medium-Voltage Ausgang zu verbinden.
- VKR C1 über den Hauptschalter einschalten. Auf der KCP sollte der Bootvorgang des PC's verfolgt werden können.
(Achtung, der LCD ist unter Umständen nicht sehr lichtstark und hat einen verdammt kleinen Einblickwinkel.)
Stoppt der Bootvorgang mit Fehlermeldung "CMOS checksum error ...", so muss wahrscheinlich die CR2032 Puffer-Batterie
auf dem Motherboard ersetzen werden und die Uhrzeit im BIOS neu gestellt werden. Um ins BIOS zu gelangen
braucht ihr eine externe
Tastatur. Diese wird mit der AT-Schnittstelle (DIN 41524 Buchse) auf dem Motherboard verbunden.
Mit Hilfe eines Adapters kann man dort auch eine PS/2 Tastatur anschließen.
Auf dem Motherboard sind des Weiteren eine PS/2- und zwei USB2-Schnittstellen vorhanden. Diese müssen aber erst noch auf Buchsen geführt werden. An der USB-Schnittstelle kann man eine USB-Tastatur betreiben, die dann aber nur im BIOS funktioniert. An der PS/2-Schnittstelle kann wohl nur eine PS/2 Maus betrieben werden. Für das Arbeiten in Windows ist es hilfreich an COM1 eine Maus anzuschließen.

Nun sollte die VKR C1 zunächst ins Windows 95 booten und anschließend die Kuka Software starten.
Wenn der PC auffällig langsam (Hochlaufzeit >> 2'40") oder nicht rund läuft sind folgende Maßnahmen in Erwägung zu ziehen:
- Speicherbausteine auf dem Motherboard ersetzen. 256MB Speicher sind ausreichend.
- Wenn die Deckel der Elektrolytkondensatoren auf dem Motherboard aufgeplatzt oder gewölbt sind, sollten diese ersetzt werden.
Schritte zum Upgrade auf KR C1:
Die Festplatte enthält zwei Partitionen. Auf der zweiten Partition liegen die Installationsdateien für das Windows 95 und die Kuka VKR C1 Software. Im Folgenden wird Windows 95 neu installiert und statt der VKR C1 Software die umfangreichere KR C1 Software aufgespielt. Der letzte Stoftwarestand auf der KRC1 müßte v4.1.7 SP08 gewesen sein.
- Erstelle ein Backup von der Festplatte für alle Fälle. Hierzu kann ein IDE zu USB 3.0 Konverter hilfreich sein.
- Kopiere die KR C1 Installationsdateien auf die zweite Partition.
- VKR C1 neu starten und nach dem Erscheinen von VxWorks die zwei Steuerungstasten (CTRL) auf der externen Tastatur drücken und halten bis Windows vollständig geladen ist. Dies soll den Start der Kuka-Software unterbinden.
- In Windows eine Startdiskette anlegen in Systemsteuerung/Programme entfernen/Startdiskette.
- PC neu starten, im BIOS die Bootreihenfolge ändern und von der erstellten Startdiskette booten.
- Folgende Befehle eingeben:
- format C: (Formatieren des Laufwerks C:)
- D: (Wechsel zum Laufwerk D:)
- cd german/Win95 (Wechseln in das Win95 Verzeichnis)
- setup (Windows 95 Installation starten)
- Falls ein Anschluss an ein IP-Netz geplant ist, dann beim Installationsschritt "Netzwerkkonfiguration" das Protokoll Microsoft/TCP-IP hinzufügen.
- Der Client für das MSN-Netzwerk kann gelöscht werden.
- In der Datei- und Druckerfreigabe andere Benutzer zulassen.
- Wenn der PC neu startet, dann die Bootreihenfolge wieder ändern oder die Bootdiskette entfernen.
- Nach erfolgreicher Installation von Windows 95 evt. Tastatur in der Systemsteuerung anpassen.
- Kuka Software installieren.
- Mit dem Windows Explorer in das Hauptverzeichnis mit den Installationsdateien der Kuka-Software gehen.
- Datei Smsetup.exe im Ordner Internat/Tools/Smsetup starten.
- Datei Setup.exe im Hauptverzeichnis starten.
- "mit E2-/E7" auswählen für VW-Roboter.
- Robotertyp entsprechend Typenschild auf dem Drehkranz und der Zentralhand auswählen. Dazu z.B. den Ordner KRC1/KR200_2_ZF/Floor/ auswählen.
- keine Optionen wählen
- PC neu starten


Überbrückung der Sicherheiten für Stand-alone Betrieb:
Über den Stecker XS2 müssen dem Roboter eine Reihe Freigaben erteilt werden, bevor man ihn fahren kann. Dies ist für den Betrieb in einer Produktionsstraße gedacht. Für den Stand-alone Betrieb sind daher eine paar Brücken entsprechend dem folgenden Bild an diesem Stecker herzustellen.
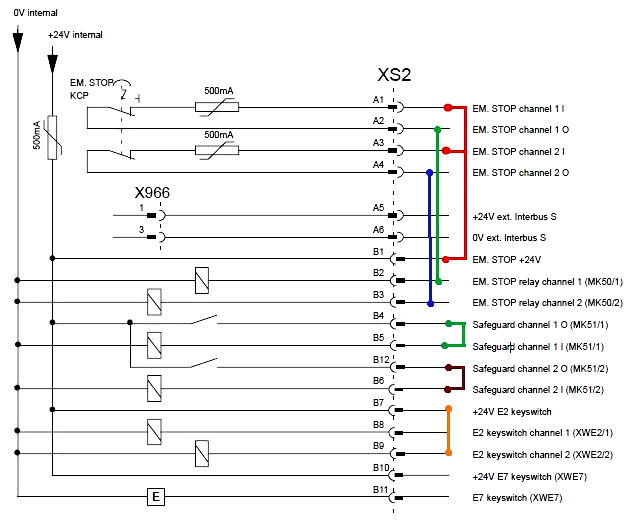
Die Brücke von B7 zu B9 kann meines Erachtens entfallen. Sie soll bewirken, dass im manuellen Modus die Betriebsart T2 aktiviert wird. Würde man alternativ B7 mit B8 brücken, dann würde die Betriebsart T1 aktiviert. Brückt man dagegen B7 überhaupt nicht mit einem anderen Pin, so wird ebenfalls die Betriebsart T2 aktiviert. B7 nicht zu brücken, hat bei mir zusätzlich den Vorteil, dass im Automatikmodus der Fehler ‚Schutzgitter offen‘ nicht erscheint.
Initialisierung des Roboters
Nach der Erstinstallation fordert die Software zur Justage aller 6 Achsen auf. Dazu muss jede Achse des Roboters nacheinander an eine definierte Position gefahren und in der Kuka Software abgespeichert werden. Die Vorgehensweise ist integral in der Bedienungsanleitung im Kapitel Inbetriebnahme/Roboterjustage beschrieben.
Es kann nötig sein vor dem Verfahren bestehende Meldungen zu quittieren, vor allem wenn die Fehlermeldung 'Aktive Kommandos verriegelt' erscheint. Dazu mit der blauen Taste in das Meldungsfenster wechseln und unten ‚alle quittieren’ drücken.
Zum Fahren des Roboters den Betriebsartenwahlschalter auf "Manuell" stellen. Dann oben links im KCP den "+-"-Modus wählen (offiziell: Verfahren mit den Verfahrtasten). Anschließend eine der drei Zustimmtasten auf der Rückseite des KCP drücken und über die Verfahrtasten rechts die Achsen 1 bis 6 nacheinander fahren und jeweils justieren. Nach dem Justieren einer Achse kann man diese Achse auch problemlos in eine andere Position fahren, bevor man die nächste Achse justiert, denn Achtung, so lange der Roboter nicht am Boden fixiert ist wird er schnell unstabil sobald man die zweite Achse über die Vertikale vorbewegt. Unten rechts auf dem Bildschirm könnt ihr noch die manuelle Fahrgeschwindigkeit anpassen. Zur Feinjustage solltet ihr 1% oder 3% wählen.
Habt ihr bei einer Achse zu früh "Justiere" gedrückt, könnte ihr eine Achse über das Menü auch gezielt Dejustieren.
Wenn euch die Justageuhr zu teuer ist, dann kann man mit einer dritten Hand auch die Messpatrone manuell mit einem Stift oder Schraubendreher eindrücken. Wer etwas Feingefühl in den Fingern hat, kann den tiefsten Punkt der Messkerbe auch erspüren. Bei dieser Vorgehensweise leidet natürlich die Wiederholgenauigkeit, wenn eine neue Justage nötig wird.
Nach erfolgter Justage sollte der Roboter betriebsbereit sein.
Expertenmodus
Für verschiedene Manipulationen muss in den Expertenmodus gewechselt werden:
- In den Handbetrieb wechseln, falls noch nicht getan.
- In der Kuka Software den Menüpunkt Konfiguration/Benutzergruppe auswählen.
- Am unteren Bildschirmrand "Experte" auswählen.
- Passwort "kuka" eingeben.
Dank
Ein sehr großer Dank geht an Helmut Rohe, ohne dessen Hilfe ich nicht so schnell zum Ziel gekommen wäre.
Haftungsausschluss:
Nachmachen auf eigene Gefahr und Haftung.
Nächste Themen:

© by Claude Loullingen