Claude Loullingen
Let no grass grow under your feet. You are what you create.
Let no grass grow under your feet. You are what you create.
Controlling a robot gripper
|
|
|
|
Intro:
Without a tool, a robot is only half the battle. Together with the robot I had bought a pneumatic gripper (Schunk PGN+125/1AS) for a very reasonable price.

Pneumatic control:
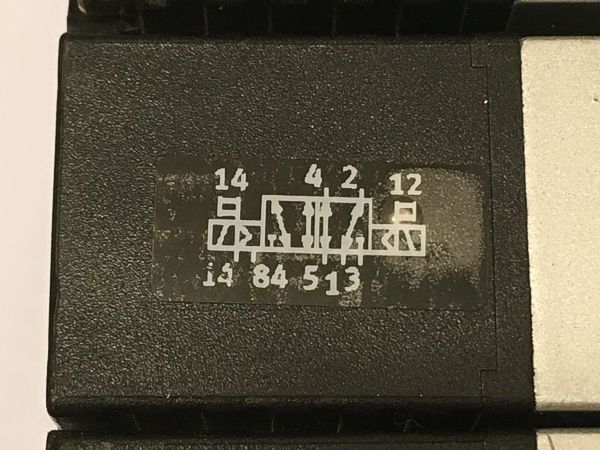
For controlling the gripper, I had a valve terminal from Festo of type 03/04 at my disposal, of which I only use a single two-way valve. The terminal had a VW-typical Interbus bus node to address the individual inputs, outputs and valves. Since I already used a DeviceNet controller to realize the automatic external mode, I wanted to bypass the Interbus controller. This was actually possible because the individual two-way valves are simply controlled with 24V pulses. So I cannibalized the controller housing and connected the coils of the two-way valves directly to the DeviceNet controller.
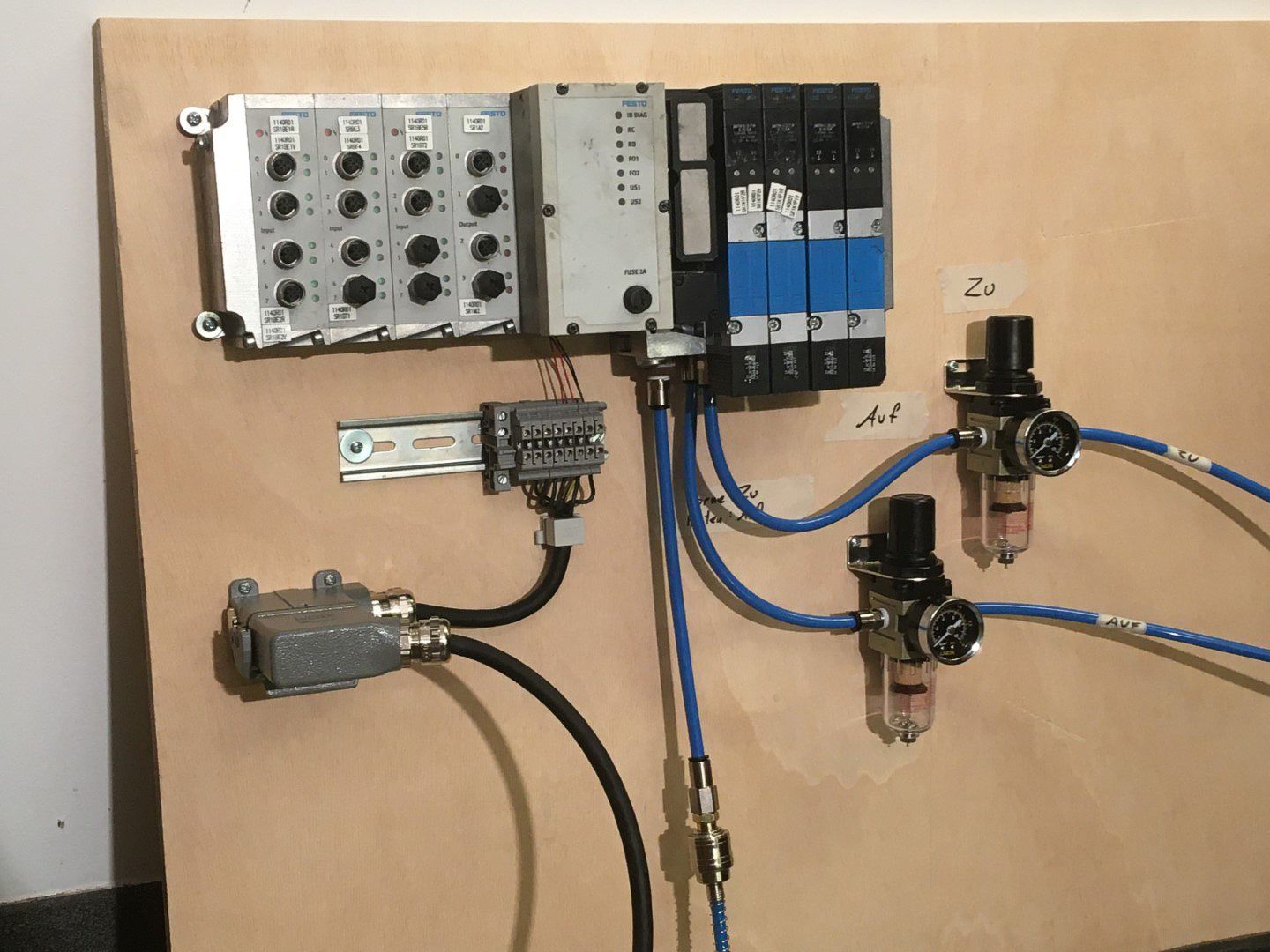
In order to control the power of the gripper, I first removed the closing spring. Additionally I used two pressure reducers as you can see on the photo. Of course you could also put a single pressure reducer in front of the inlet, but the valves only work correctly from 2 bar. By placing the pressure reducer behind the valves I can reduce the pressure to 1 bar. It is important that the pressure reducers do not also act as a non-return valve, otherwise the line to the gripper never becomes pressureless. It should be noted that also the valves need to vent the inactive outlet.
Configuration on the KRC1:
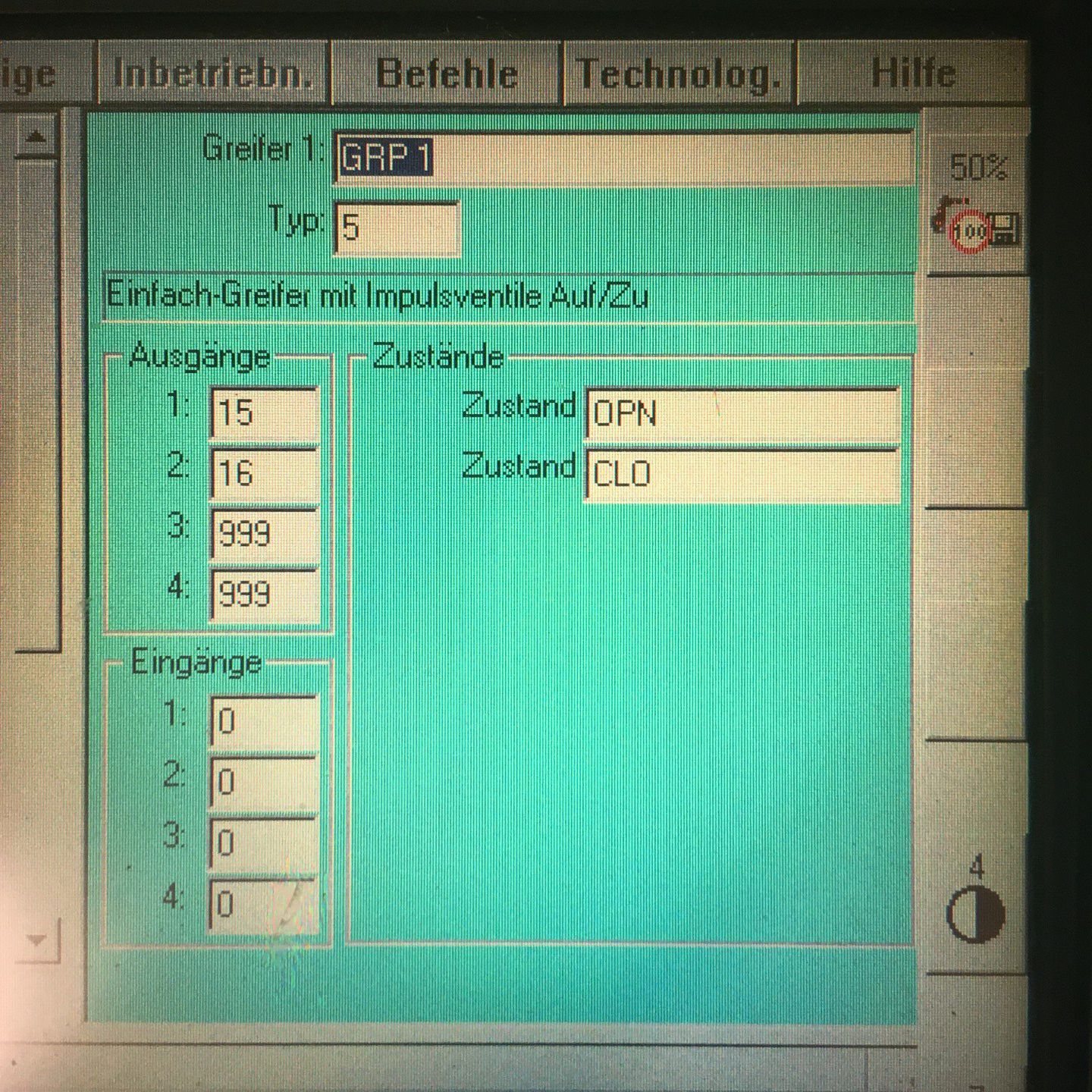
The configuration of the KR C1 is relatively straightforward. The two outputs on the DeviceNet via which the gripper is controlled are defined in the menu item Config/In/Outputs/Gripper, as already known from automatic external mode. I used the outputs 15 and 16. Type 5 causes only pulses to be generated during manual operation of the gripper and the 24V are not permanently applied as with type 1. Now you should be able to operate the gripper manually at the KCP. In the program, the gripper can then be moved with the commands PULSE or OUT.
Disclaimer:
The above described manipulations require technical knowledge. I do not take over any warranty or responsability for any damage that might occur when following my instructions. You do this at your own risk.
© by Claude Loullingen