Claude Loullingen
Nutze die Zeit. Du bist, was du erschaffst.
Nutze die Zeit. Du bist, was du erschaffst.
Projekte
2024
2023
2022
2021
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
- elektronischer Thermostat
- Mag Charger
- eBib
- 3D-Modell in Google Earth
- Laptopnetzteil
- Blaulichtblitzer
- Defibrillator
- miniLEO
- File sharing in Windows XP
- Meine eigene Homepage
2008
2007
2005
2004
2003
2000
1999
1998
1995
1988
Diplomarbeit
Ziel meiner Diplomarbeit:
In meiner Diplomarbeit sollte ich die Eignung eines 3D-Oberflächenscanners zur Positionsbestimmung eines Patienten auf einem Operationstisch analysieren und einen Algorithmus zur automatischen Bestimmung der Transformationsmatrix zwischen dem Scanner- und dem Tomographenkoordinatensystem entwickeln.
Hintergründe:
Will man mit einem Roboter zum Beispiel den Gehirntumor eines Patienten entfernen, so kann man technisch wie folgt vorgehen:
- Ein Arzt oder ein Computer zeichnet vor der Operation zunächst die Abgrenzung des Tumors in einem MRT oder einem anderen 3D-Volumenmodell des Patienten ein.
- Auf dem OP-Tisch wird ein 3D-Oberflächenscan vom Gesicht des Patienten durchgeführte.
- Durch Matching des 3D-Oberflächenscans mit dem 3D-Volumenmodell wird die Transformationsmatrix zwischen MRT und dem Patienten auf dem OP-Tisch bestimmt. Dadurch weis der Roboter welcher Punkt im Tomogramm welcher Position im Operationssaal entspricht.
- Nun kann der Roboter den vorher markierten Bereich bearbeiten.
3D-Oberflächenscanner:
Der Oberflächenscanner besteht im Wesentlichen aus einem LCD-Projektor, einer CCD-Kamera, einem PC mit entsprechender Hardware und einer bildverarbeitenden Software.
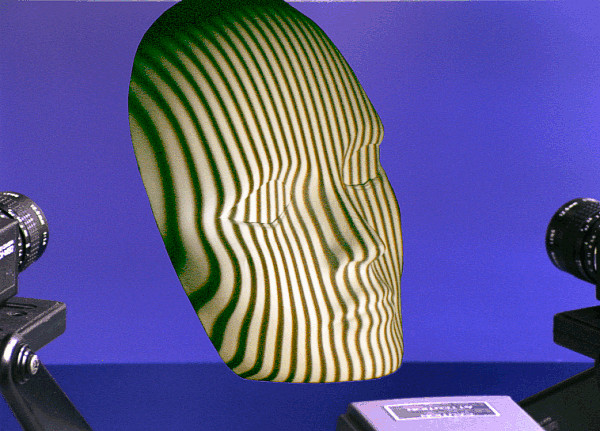
Mit freundlicher Genehmigung der RSI GmbH
Der Projektor wirft eine Serie von Streifenmustern auf das zu vermessende Objekt. Durch Analyse der entstehenden Bilder kann die Position jedes Kamerapixels auf der Oberfläche des Objekts relativ zum Kamerakoordinatensystem bestimmt werden. Die Menge aller Messpunkte bildet eine Punktwolke die der Oberfläche des vermessenen Objekts folgt.
Visualisierung der Punktwolke eines Kunstkopfes:
Matching:
Bringt man den Oberflächenscan mit dem 3D-Volumenmodell zusammen, so sind beide bedingt durch die Lage ihres jeweiligen Koordinatenursprungs nicht zwingend sofort deckungsgleich. Tommogramm und Punktwolke können also zunächst gegeneinander versetzt sein.
Durch Verschieben und Drehen der Punktwolke muss diese nun zur Überdenkung mit dem Volumenmodell gebracht werden. Dieser Prozess wird als Matching bezeichnet und ist mathematisch gesehen nichts anderes als die Bestimmung der Koeffizienten einer Transformationsmatrix.
Teil meiner Arbeit war es nun einen Algorithmus zu schreiben der dieses Matching automatisch durchführt und als Ergebnis die entsprechende Transformationsmatrix liefert.
Ergebnis des automatischen Matchings:
Man erkennt, dass der Rechner die Punktwolke trotz Streupunkten sehr gut mit dem 3D-Volumenmodell zur Überlagerung gebracht hat.
Download:
Hier meine Diplomarbeit als PDF-Download:
© by Claude Loullingen