Claude Loullingen
Nutze die Zeit. Du bist, was du erschaffst.
Nutze die Zeit. Du bist, was du erschaffst.
Projekte
2024
2023
2022
2021
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
- elektronischer Thermostat
- Mag Charger
- eBib
- 3D-Modell in Google Earth
- Laptopnetzteil
- Blaulichtblitzer
- Defibrillator
- miniLEO
- File sharing in Windows XP
- Meine eigene Homepage
2008
2007
2005
2004
2003
2000
1999
1998
1995
1988
Kuka PM6-600 Leistungsmodul
|
|
|
|
Stand: November 2021
Einleitung:
Im Folgenden wird das PM6-600 Leistungsmodul der Robotersteuerung KRC1 von Kuka vorgestellt und ich teile meine Erfahrungen zur Reparatur.
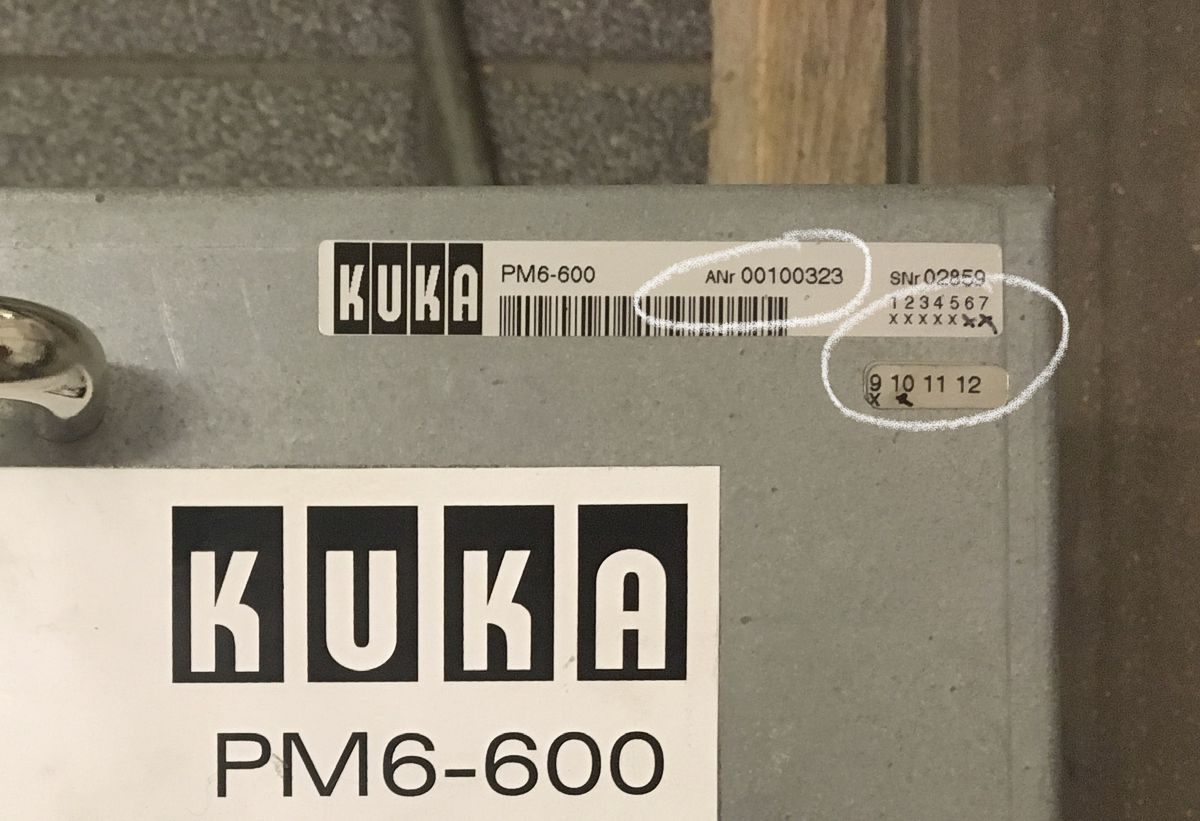
Es gibt drei Modelle der PM6-600. Diese haben folgende Artikelnummern (in chronologisch aufsteigender Reihenfolge):
- 71-039-278
- 00-100-323
- 00-103-494
Vom ersten Modell wäre abzuraten. Die zweite sollte mindestens Revision 9 haben um zuverlässig zu sein. Die Revision ist mit den x'en unter der Seriennummer markiert. Händisch eingetragene Kreuze symbolisieren ein nachträgliches Upgrade, aber das kann man natürlich leicht vortäuschen.
Das PM6-600 kommt ursprünglich von der Firma Inda die jetzt IWS GmbH heißt und in Ichenhausen (D) sitzt. IWS kann die PM6-600 Modul gerade noch reparierten (Stand Oktober 2021), aber die Kosten lägen bei 1000€ aufwärts.
Inhaltsverzeichnis:
Unterlagen:
Serviceanleitung, Datenblätter, Bestückungs- und Schaltpläne findet ihr hier:
Funktionsweise und Aufbau:
Korrektur: Entgegen der Behauptung im Video schließen die Kurzschlussrelais nicht mit der Betätigung des Notaus, sondern nur verzögert nachdem die Zwischenkreisspannung abgeschalten wurde, also wenn ihr den Totmanntaster löst resp. ein Programm beendet. Es sieht so aus als wenn die Relais schließen sobald die Zwischenkreisspannung unter 50V fällt.
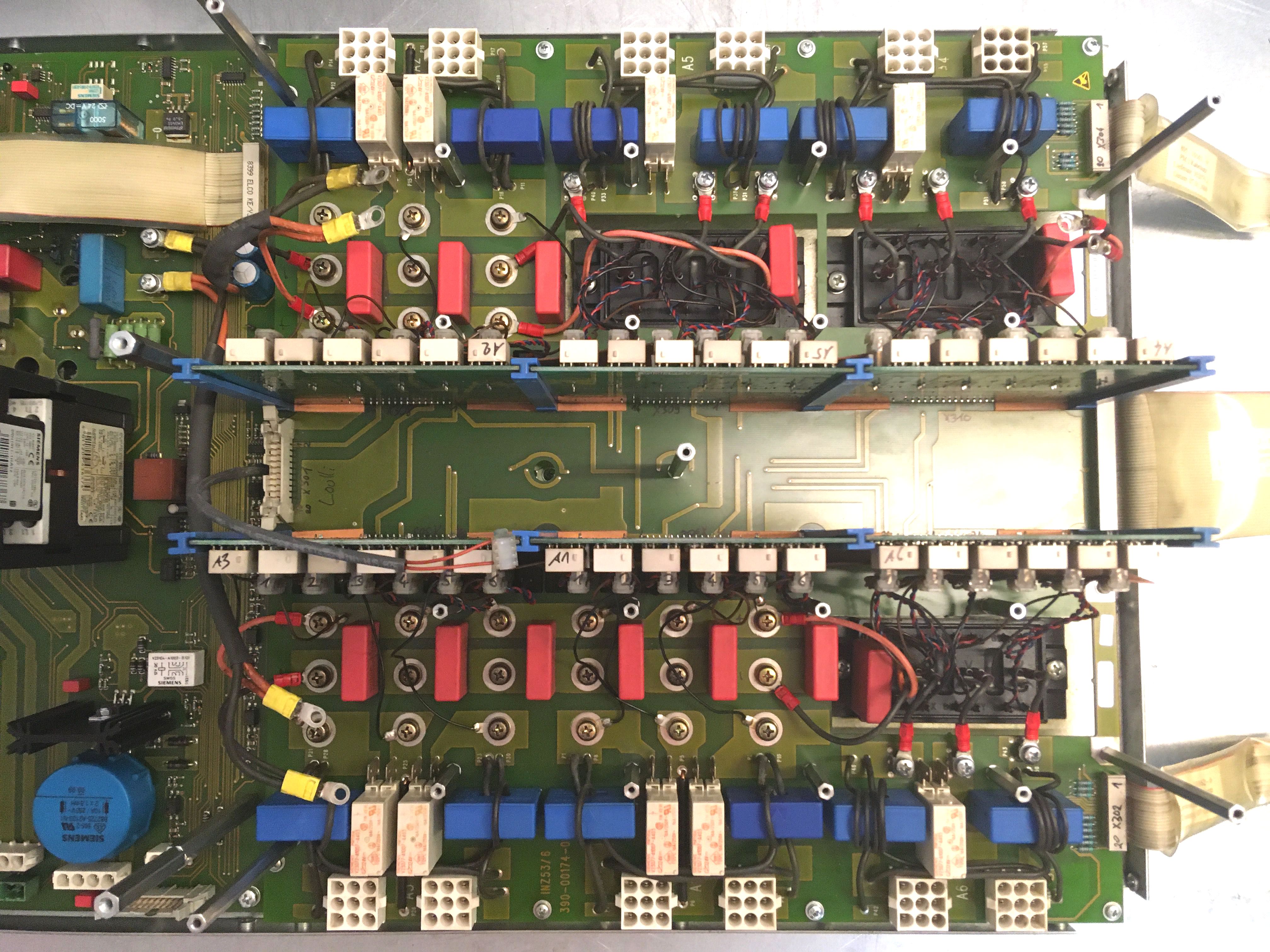
Mainboard INZ53
Hochspannungsnetzteil INZE33

Niederspannungsnetzteil MGV

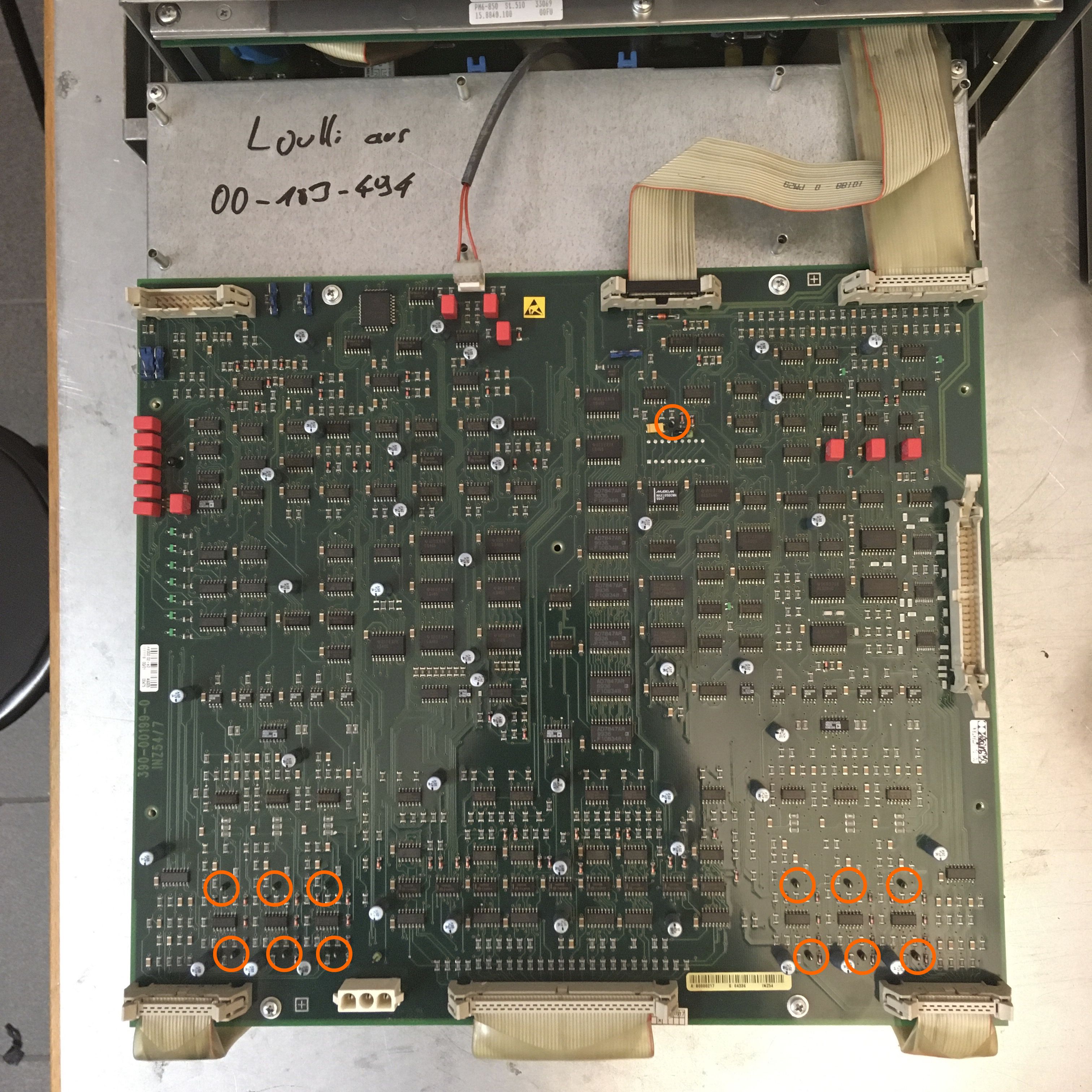
Logikboard INZ54 mit den 13 Messpunkten (MP)
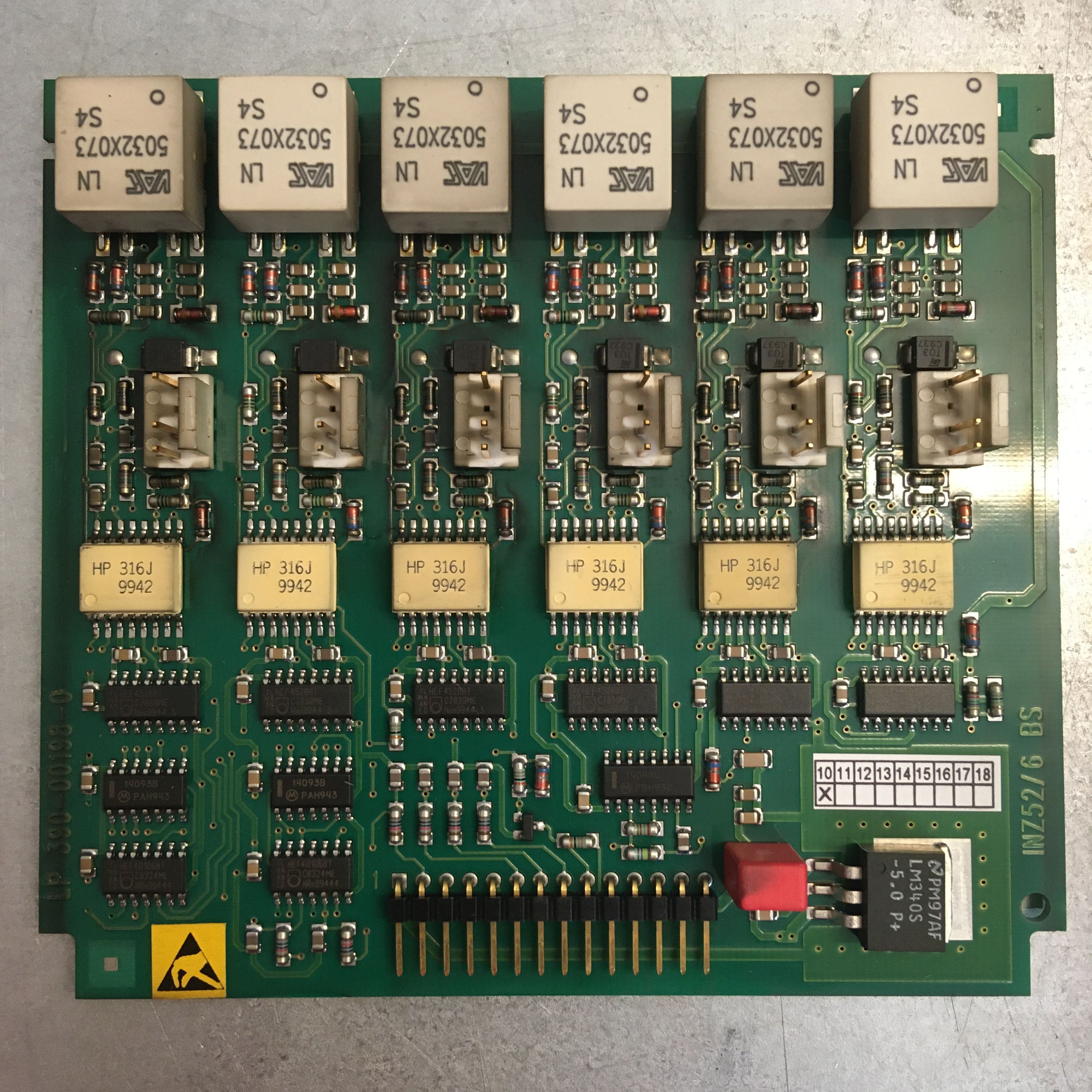
Treiber-Karte INZ52
Fehlersuche im Robotersystem:
Ich möchte die Fehlersuche nicht nur auf das PM6-600 beschränken, sondern meine bisherigen Erfahrungen mit dem Gesamtsystem teilen. Da man bis auf die 13 Messpunkte auf dem Logikboard (12 Strommesswerte und die Zwischenkreisspannung) kaum Messungen im laufenden Betrieb vornehmen kann, habe ich bisher viel mit Gegentauschen gearbeitet um Fehlerquellen einzugrenzen. Das setzt natürlich voraus, dass man ein zweites ähnliches Robotersystem zur Verfügung hat, was vor allem im Amateurbereich seltenst der Fall sein wird, aber mit den folgenden Tipps sollte es nicht hoffnungslos sein.
-
Fehler auf den Roboter oder die Steuerung eingrenzen
Wenn ihr kein zweites System habt, könnt ihr bei Problemen mit Kurzschlüssen oder Überströmen erstmal die Wicklungswiderstände der Motoren durchmessen. Dazu würde ich die 6 Motorkabel am PM6-600 abziehen und die drei Wicklungen direkt am Stecker durchmessen, da damit die Kabel gleich mit kontrolliert werden. Ihr solltet dreimal einen ähnlich niedrigen Widerstand messen. Anschließend würde ich die Isolationswiderstände der drei Adern gegen Erde messen, um etwaige Beschädigungen an der Isolation aufzuspüren.
Eine weitere grobe Kontrolle ist das Lösen der Bremsen, um zu kontrollieren, ob sich die Achsen manuell bewegen lassen und kein mechanisches Problem vorliegt. Beim Lösen der Bremsen an Achse A2 und A3 muss der Roboter natürlich gestützt werden. Achtung auch bei der Achse A2, durch die hydraulische Rückstellung liegt die natürliche Ruhelage (ohne Werkzeug) fast in der Senkrechten. Beim Lösen der Bremse A2 besteht also eher das Risiko, dass sich der Arm hebt, als dass er fällt.
Zum Öffnen der Bremsen einfach 24V auf die entsprechenden Pins am Motorstecker des Roboter geben. Achtung, ihr gebt Strom auf eine Spule, also vorzugshalber die 24V herunterdrehen bevor ihr abzieht um hohe Selbstinduktionsspannungen zu vermeiden.
-
Betriebsspannungen kontrollieren
Scheint euer Problem eher bei der PM6-600 zu liegen, würde ich mit der Kontrolle der Betriebsspannungen beginnen. Leuchten alle 8 LEDs am MGV gleich hell, dann sollten die Betriebspannungen ok sein und die oberen 5 Sicherungen können auch nicht durchgebrannt sein. Die untere Sicherung sichert den Ladestrom zur Batterie ab. Wenn eure Batterien also nicht laden wollen, könnte es an der Sicherung F1 liegen.
Die Zwischenkreispannung kann am Messpunkt P1 oben auf dem Logikboard kontrolliert werden (1V am Messpunkt entspricht 100V im Zwischenkreis). Die Zwischenkreisspannung wird erst beim Drücken des Todmannschalters eingeschaltet und sollte um 565V (=400V*1,41) liegen, wenn ich mich nicht irre.
-
Gegentauschen
Da Probleme am Roboter meistens einzelne Achsen betreffen, kann man oft durch Gegentauschen die Ursache einkreisen. Eine elegante Methode des Gegentauschen ist es, im Expertenmodus die Datei $machine.dat im Ordner R1/MADA zu verwenden. Ändert man z.B. die Variablen wie folgt ab, so wird sich am Roboter die Achse 6 bewegen, wenn man am KCP die Tasten der Achse 5 betätigt und umgekehrt.
$DSECHANNEL[5]=6
Leider kann man keine Achse einzeln deaktivieren, nur die Anzahl an Achsen insgesamt reduzieren.
$DSECHANNEL[6]=5
$PMCHANNEL[5]=6
$PMCHANNEL[6]=5INT $NUM_AX=3
Letzteres bewirkt z.B., dass nur die ersten 3 Achsen angesteuert werden.
Gegentauschen der Motoren durch Gegentauschen der Anschlusskabel geht bestenfalls nur am Roboter selber, nicht an der PM6-600, da immer das Leistungskabel und das Kabel zum Drehgeber zusammen gegengetauscht werden müssen. Am KR-200 geht dies höchstens an den Achsen A4 bis A6. Natürlich müssen die entsprechenden Achsen nach dem Tauschen neu justiert werden. Wandert euer Problem nach dem Tauschen zu einem anderen Motor, so liegt die Ursache wohl bei der Steuerung, ansonsten am Roboter.
Wenn ihr Probleme mit mehreren Achsen habt, kann es hilfreich sein den Leistungsstecker an einem der Motoren abzuziehen. Dies erzeugt keine Fehlermeldung solang ihr die abgeklemmte Aschse nicht bewegt. Da die Bremse auch auf dem Leistungsstecker aufgelegt ist, kann sich die Bremse an diesem Motor auch nicht lösen, während ihr einen der anderen Motoren bewegt.
Auch wenn ihr kein Zweitsystem habt, so könnt ihr dennoch fehlerhafte Treiberkarten durch Gegentauschen zwischen den 6 Achsen identifizieren. Vergesst nicht die 6 Stecker an den Treiberkarten zu nummieren bevor ihr sie abzieht!
Achten beim Zusammenbau der PM6-600 peinlichst darauf, dass alle Stecker richtig gesteckt sind, denn die resultierenden Fehlermeldungen deuten nicht immer darauf hin. Wenn ihr z.B. vergesst, das Flachbandkabel zu stecken das vom MGV Netzteil zum Mainboard geht, kriegt ihr eine zufällige Anzahl an Überstromfehlern.
Es passiert auch leicht, dass man die Verbindungskabel ziwschen den IGBT-Modulen und den Treiberkarten zu hoch oder zu tief auf die Stiftleisten steckt. Die Konsequenzen können fatal sein.
Auch die Installation der PM6-600 in der KRC1 ist fehlerträchtig. 15 Kabel sind daran anzuschließen. Zählt mit!
-
Forum
https://www.roboterforum.de/roboter-forum/board/40-kuka-roboter/
Bitte dort präzise Fehlerbeschreibungen abgegeben mit genauer Fehlermeldung.
-
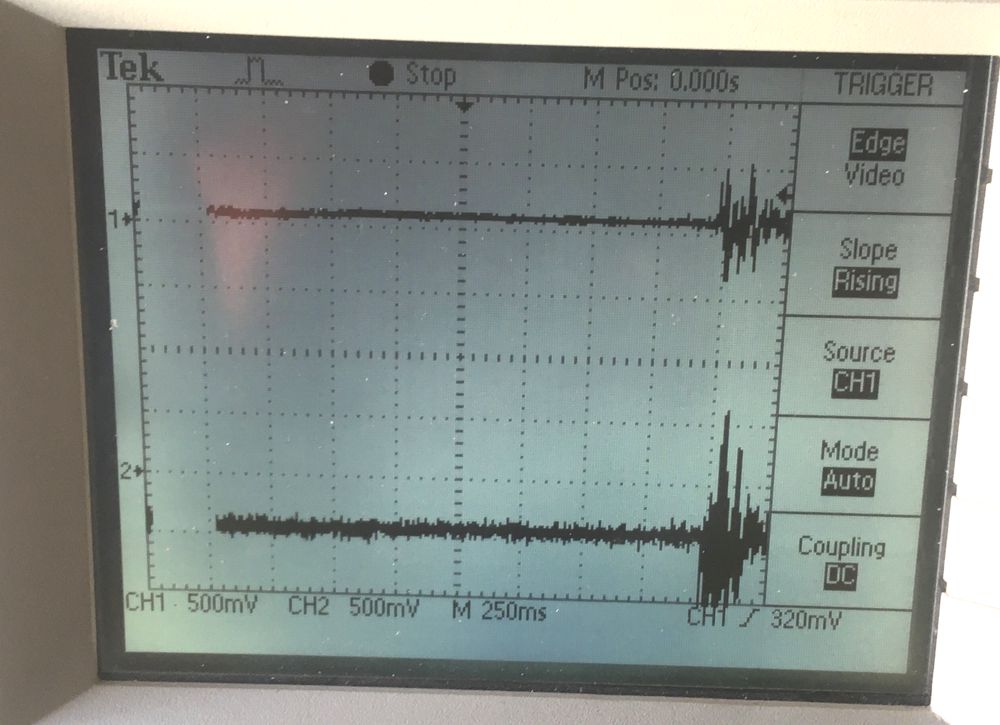
Strommessung
Der Vollständigkeit halber sei hier auch die Möglichkeit erwähnt an den 12 Messpunkten die Ströme durch jeweils 2 der 3 Phasen eines Motor mit dem Oszilloskop zu beobachten. Im Moment kenne ich allerdings kein Problem das man damit identifizieren könnte. Hier aber als Referenz das Ergebnis von zwei Messungen an den zwei Phasen der Achse A3. Das erste Bild zeigt die Ströme wenn der Motor nur seine Position hällt, das zweite wenn er langsam bewegt wird.

Hier eine Auflistung erlebter Fehler und deren Ursache. Fast alle Fehler betraffen die PM6-600.
| Fehler | Ursache |
| Überstrom an Achse Ax, ohne dass es dafür einen offensichtlichen Grund gäbe. | Entweder defekte Treiberkarte oder defektes IGBT Modul. Eine defekte Treiberkarte kann man durch Gegentauschen von zwei Treiberkarten identifizieren. IGBT-Moduls kann man z.B. wie folgt kontrollieren: How to test an IGBT with a Multimeter |
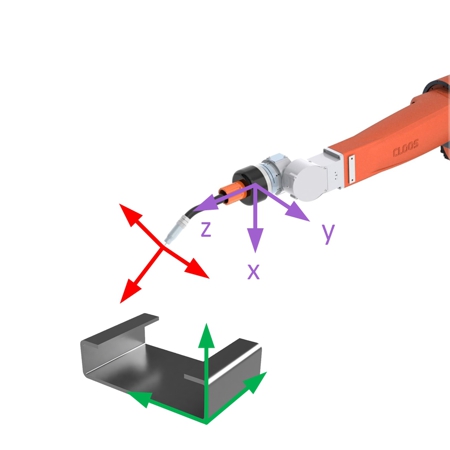
| Flansch bewegt sich diagonal, obwohl man längs einer Achse im Weltkoordinatensystem verfährt. | Zwei Phasen an einem Motor sind vertauscht. Gefunden durch Kontrollieren der Drehrichtungen im Roboterkoordinatensystem. Dieser Fehler kann auch durch Setzen eines Parameters in der Datei machine.dat korrigiert werden. Siehe WWW. |
| Kurzschluss gleich nach dem Betätigen des Todmannschalters. | Defektes IGBT-Modul. Durchgang zwischen den Polen der Zwischenkreisspannung. |
| Kurzschluss beim Bewegen irgendeines Motors. | Defekter Stromwandler auf dem Mainboard. Nur durch den Ausbau des Mainboards und Funktionsprüfung der Wandler eindeutig bestimmbar. |
| Mahlende Geräusche beim Bewegen eines Motors und anschließend eine Fehlermeldung "maximales Getriebemoment". | Defekter Stromwandler auf dem Mainboard. Nur durch den Ausbau des Mainboards und Funktionsprüfung der Wandler eindeutig bestimmbar. |
| Fehlermeldung "Stromkabel falsch gesteckt oder nicht angeschlossen" an allen 6 Achsen obwohl die Kabel gesteckt sind. | Das Verbindungskabel zwischen PM6-600 und PC ist nicht gesteckt. |
| Nach Neustart ist die Justage von allen Achsen verloren, obwohl die Pufferakkus noch ok sind und die Achsen auch nicht im ausgeschalteten Zustand bewegt wurde. | Das EEPROM Xicor X28HC64J-12 auf der RDW-Platine im Fuß des Roboters hat die maximale Anzahl an Schreib-Lesezyklen erreicht. EEPROM ersetzen (sehr fummelig, aber günstig) oder ganze Platine ersetzen, am besten durch das Nachfolgemodell RDW2, das ohne EEPROM auskommt. |
Lagerbestand:
Folgende Teile habe ich auf Lager und könnte ich bei Interesse günstig abgeben. Einfach kontaktieren.
- 6 Treiberkarten INZ52/3 390-00157-0
- Eine komplette PM6-600 (Artikelnummer: 71-039-278). Nur abzugeben wenn die gleiche Artikelnummer ersetzt werden soll.
Haftungsausschluss:
Ich bin kein PM6-600 Experte und teile hier nur meine Erfahrungen nach bestem Wissen und Gewissen. Nachmachen auf eigene Gefahr und Haftung.
Nächste Themen:

© by Claude Loullingen