Claude Loullingen
Nutze die Zeit. Du bist, was du erschaffst.
Nutze die Zeit. Du bist, was du erschaffst.
Projekte
2024
2023
2022
2021
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
- elektronischer Thermostat
- Mag Charger
- eBib
- 3D-Modell in Google Earth
- Laptopnetzteil
- Blaulichtblitzer
- Defibrillator
- miniLEO
- File sharing in Windows XP
- Meine eigene Homepage
2008
2007
2005
2004
2003
2000
1999
1998
1995
1988
Fernsteuerung eines Kuka Roboters via serielle Schnittstelle
|
|
|
|
CREAD/CWRITE:
Die Steigerung der Expertenprogrammierung ist die Fernsteuerung. Damit ein Roboter dynamisch auf sich verändernde Bedingungen reagieren kann, bedarf es externer Sensorik. Klassicherweise wäre dies ein Kamerasystem das die Position eines zu greifenden Objekts erkennt. Diese Position muss nun an den Roboter übertragen werden. An der KRC1 steht dafür unter anderem eine serielle Schnittstelle zur Verfügung. Das Thema wird im Dokument CREAD/CWRITE von Kuka behandelt. Die folgende Seite soll bei der Umsetzung helfen.
Wer Hintergrundinformationen zur RS232 benötigt, findet diese z.B. in meinem Kurs zur serielle Schnittstelle.
Erste Schritte:
Wir wollen die COM2 Schnittstelle nutzen, welche an der VKRC1 eventuell mit der Interbus-Karte verbunden ist um letztere anscheinend zu konfigurieren. Wenn ihr den Interbus nicht benutzt oder die Karte bereits konfiguriert ist, dann könnt ihr die Verbindung lösen.

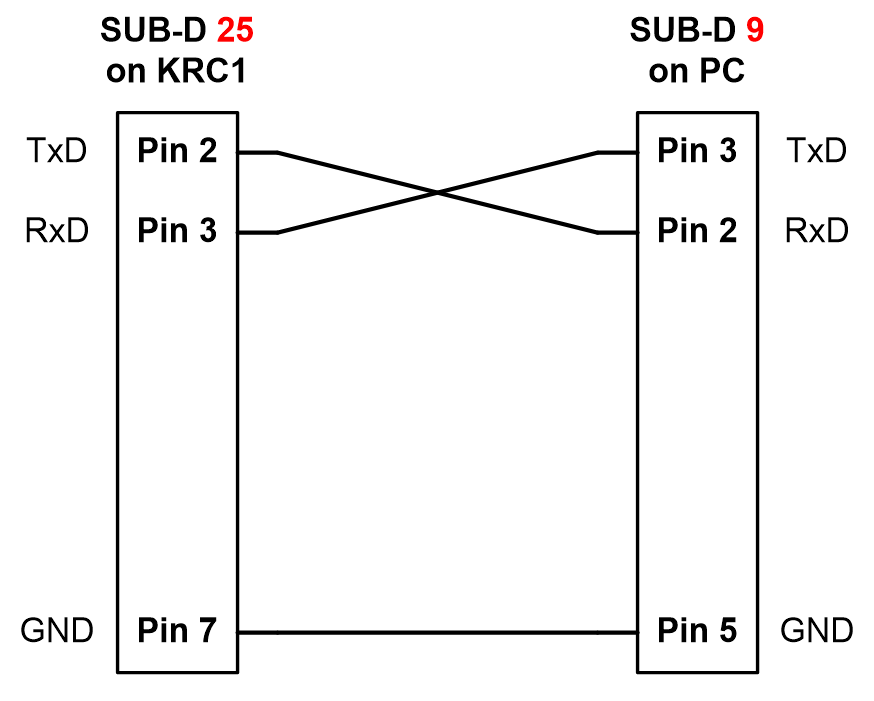
Ihr wollt vielleicht zunächst die serielle Schnittstelle an eurer KRC1 auf Funktionstüchtigkeit testen. Verbindet dazu einen PC über ein Nullmodemkabel mit der COM2 Schnittstelle der KRC1. Das Nullmodemkabel benötigt mindestens drei Adern entsprechend folgendem Verdrahtungsplan. RTS, CTS und DTR müssen also nicht verwendet werden, DSR nur wenn ihr es so in der SERIAL.INI festgelegt habt.
Öffnet nun am PC und an der KRC1 ein Terminalprogramm wie Hyperterminal, Putty oder Hterm.
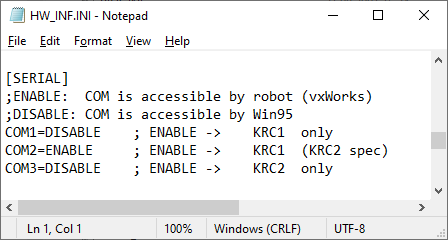
Stellt in der Datei HW_INF.INI (Pfad: C:\KRC\ROBOTER\INIT) sicher, dass COM2 noch DISABLE ist, sonst
kann nur die Kuka Software auf diese serielle Schnittstelle zugreifen.
Um an der KRC1 das Hyperterminal zu öffnen, müsste ihr in den Expertenmodus wechseln
(Menüpunkt Konfiguration/Benutzergruppe), dann Numlock abwählen und mit CTRL + ESC das Windows
Startmenü öffnen. Dort z.B. das Hyperterminal suchen und öffnen. Wählt die gleichen Parameter in
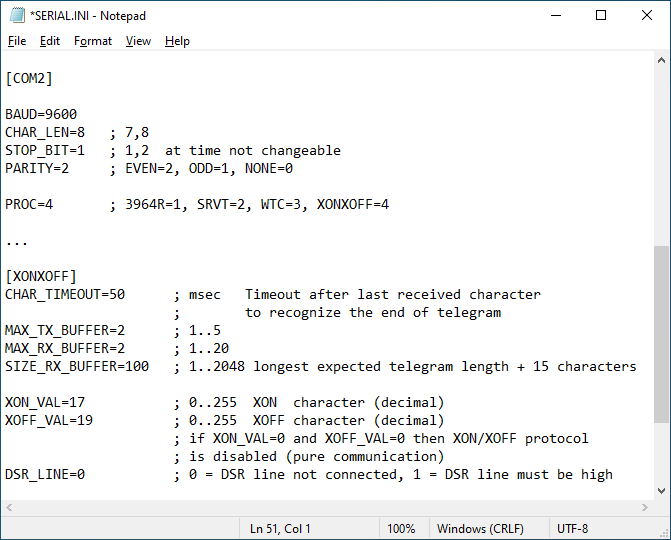
beiden Terminals. Standardmäßig verwendet Kuka:
- Geschwindigkeit: 9600 Bit/s
- Anzahl an Datenbits: 8
- Anzahl an Stoppbits: 1
- Parity Bit: gerade
- Flusskontrolle: Xon / Xoff
Wenn ihr die beiden Terminals erfolgreich konfiguriert habt, sollten nun alle Zeichen die ihr in einem Terminalprogramm eingetippt habt, im Fenster des anderen Terminals erscheinen. Somit ist die Funktionsfähigkeit der Schnittstelle schon mal sichergestellt.
Konfiguration an der KRC1:
Es müssen nun die Dateien HW_INF.INI und SERIAL.INI (Pfad: C:\KRC\ROBOTER\INIT) entsprechend dem Dokument von Kuka angepasst werden. Die Datei $CUSTOM.DAT (Pfad: C:\KRC\ROBOTER\KRC\STEU\Mada) braucht nicht angepasst zu werden.
Das Protokoll zur Datenflusskontrolle in SERIAL.INI muss mit Bedacht gewählt werden. Beim Protokoll 3964R muss wohl zunächst ein Handshake erfolgen, bevor ihr Daten übertragen könnt. Die meisten Terminalprogramme unterstützen dies nicht, somit ist zum Testen XON/XOFF besser geeignet.
Haftungsausschluss:
Das vorliegende Projekt erfordert Fachkenntnisse. Nachmachen auf eigene Gefahr und Haftung.
KRL Programm:
&ACCESS RVP
DEF serial_to_robot( )
;This program waits for a valid position being received at the COM2
interface and then moves the robot to that position.
;--------- Declaration ---------
DECL INT HANDLE, I, J, CREAD_OFFSET, ANSWER, NUMBER
DECL CHAR NOTIFY_TEXT[5], READ_STRING[20]
DECL REAL TIMEOUT, CHECKSUM, SUMCOORD
DECL STATE_T CWRITE_STATE, CREAD_STATE
DECL MODUS_T MODUS
DECL AXIS HOME
DECL POS PositionRobot
EXT BAS(BAS_COMMAND:IN, REAL:IN)
;---------- Initialization ---------
BAS(#INITMOV,0) ;Initialization of speed, acceleration and coordinate
system
$BASE = $WORLD ;setting the base to the world coordinate system (mandatory when using a frame)
$TOOL = $NULLFRAME ;setting the tool center point to the middle of the robot flange
HOME={AXIS: A1 0,A2 -90,A3 90,A4 0,A5 0,A6 0} ;set home position
CHECKSUM=0
SUMCOORD=0
I=1
FOR J = 1 to 6
$VEL_AXIS[J]=30 ;x% max. speed
$ACC_AXIS[J]=100 ;x% max. acceleration
ENDFOR
;---------------------------------------
; Main program
;---------------------------------------
;------------- Open channel to COM2 -----------
COPEN(:SER_2,HANDLE) ;Open a channel to COM2 according to config in
serial.ini. If XON/XOFF is used, then a XON symbol is sent by COPEN.
IF HANDLE==0 THEN ;If an error occured during opening the channel,
then stop the program.
HALT
ENDIF
MODUS=#SYNC
LOOP ;endless loop
;------------- Write to COM2 -----------
CWRITE(HANDLE,CWRITE_STATE,MODUS," ") ;Send a space to mark
the start of the loop.
CWRITE(HANDLE,CWRITE_STATE,MODUS,"%d",I) ;Send counter value
to track the loop.
;------------ Read from COM2 -----------
TIMEOUT=60.0
CREAD_OFFSET=0
MODUS=#ABS
CREAD(HANDLE,CREAD_STATE,MODUS,TIMEOUT,CREAD_OFFSET,"%f %f %f
%f %f %f %d %d %f",PositionRobot.X,PositionRobot.Y,PositionRobot.Z,PositionRobot.A,PositionRobot.B,PositionRobot.C,
PositionRobot.S,PositionRobot.T,CHECKSUM)
;Send for example the string "2000 -800 1800 -90 90 -90 2 10 2922"
to COM2. The last value is the sum of all previous values.
IF CREAD_STATE.RET1==#CMD_TIMEOUT THEN ;If the timeout time has been
exceeded, then exit the loop.
EXIT
ENDIF
NOTIFY_TEXT[] = " " ;clear variable
NOTIFY_TEXT[] = "X: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.X) ;NOTIFY_REAL is a subprogram
defined below
NOTIFY_TEXT[] = "Y: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.Y)
NOTIFY_TEXT[] = "Z: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.Z)
NOTIFY_TEXT[] = "A: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.A)
NOTIFY_TEXT[] = "B: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.B)
NOTIFY_TEXT[] = "C: "
NOTIFY_REAL(NOTIFY_TEXT[],PositionRobot.C)
NOTIFY_TEXT[] = "S: "
NOTIFY_INT(NOTIFY_TEXT[],PositionRobot.S)
NOTIFY_TEXT[] = "T: "
NOTIFY_INT(NOTIFY_TEXT[],PositionRobot.T)
NOTIFY_TEXT[] = "CHK: "
NOTIFY_REAL(NOTIFY_TEXT[],CHECKSUM)
SUMCOORD=PositionRobot.X+PositionRobot.Y+PositionRobot.Z+PositionRobot.A+PositionRobot.B+
PositionRobot.C+PositionRobot.S+PositionRobot.T
NOTIFY_TEXT[] = "SUM: "
NOTIFY_REAL(NOTIFY_TEXT[],SUMCOORD)
IF PositionRobot.X==0 THEN ;Send the string "0" to COM2
to exit the loop.
EXIT
ENDIF
;---- Move robot to the read position ------
WAIT FOR $IN[16]==TRUE ;wait for an impulse on input 16 to trigger continuation
IF SUMCOORD==CHECKSUM THEN
PTP PositionRobot
ENDIF
I=I+1
CWRITE(HANDLE,CWRITE_STATE,MODUS,".") ;Send a dot to mark
the end of the loop.
ENDLOOP
WAIT FOR $IN[16]==TRUE ;wait for an impulse on input 16 to trigger
continuation
PTP HOME
CCLOSE(HANDLE,CWRITE_STATE) ;info: a XOFF is sent after closing
END
;---------------------------------------
; Sub programs
;---------------------------------------
;subprogram to display the value of a real variable
DEF NOTIFY_REAL(NOTIFY__TEXT[]:OUT,NUMBR:IN) ;char arrays must be called
by reference (OUT)
DECL CHAR CHARACTR, NOTIFY__TEXT[] ;index must be omitted here
DECL REAL NUMBR
DECL INT MSG_OFFSET
DECL MSG_T EMPTY_MSG
DECL STATE_T MSG_STATE
EMPTY_MSG={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] "
",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[]
" ",ANSWER 0}
$MSG_T=EMPTY_MSG
MSG_OFFSET=0
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,NOTIFY__TEXT[]) ;write MSG_OFFSET
into $MSG_T.KEY[]
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,"%f",NUMBR) ;add
the value of the real variable at the end of $MSG_T.KEY[]
$MSG_T.TYP=#NOTIFY ;set message typ
WAIT SEC 0.2 ;mandatory to solve a bug with unreleased status messages
$MSG_T.VALID=TRUE
WAIT SEC 0.2
END
;subprogram to display the value of an integer variable
DEF NOTIFY_INT(NOTIFY__TEXT[]:OUT,NUMBR:IN) ;char arrays must be called
by reference (OUT)
DECL CHAR NOTIFY__TEXT[] ;index must be omitted here
DECL INT NUMBR, MSG_OFFSET
DECL MSG_T EMPTY_MSG
DECL STATE_T MSG_STATE
EMPTY_MSG={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] "
",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[]
" ",ANSWER 0}
$MSG_T=EMPTY_MSG
MSG_OFFSET=0
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,NOTIFY__TEXT[]) ;write MSG_OFFSET
into $MSG_T.KEY[]
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,"%d",NUMBR) ;add
NUMBR at the end of $MSG_T.KEY[]
$MSG_T.TYP=#NOTIFY ;set message typ
WAIT SEC 0.2 ;mandatory to solve a bug with unreleased status messages
$MSG_T.VALID=TRUE
WAIT SEC 0.2
END
;subprogram to display a string
DEF NOTIFY_STR(NOTIFY__TEXT[]:OUT, READ_STR[]:OUT) ;char arrays must
be called by reference (OUT)
DECL CHAR NOTIFY__TEXT[],READ_STR[] ;index must be omitted here
DECL INT MSG_OFFSET
DECL MSG_T EMPTY_MSG
DECL STATE_T MSG_STATE
EMPTY_MSG={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] "
",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[]
" ",ANSWER 0}
$MSG_T=EMPTY_MSG
MSG_OFFSET=0
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,NOTIFY__TEXT[]) ;write MSG_OFFSET
into $MSG_T.KEY[]
SWRITE($MSG_T.KEY[],MSG_STATE,MSG_OFFSET,READ_STR[]) ;add CHARACTR at
the end of $MSG_T.KEY[]
$MSG_T.TYP=#NOTIFY ;set message typ
WAIT SEC 0.2 ;mandatory to solve a bug with unreleased status messages
$MSG_T.VALID=TRUE
WAIT SEC 0.2
END
Download:
 |
|
| serial_to_robot.src | Kuka_CREAD-CWRITE.pdf |
Nächste Themen:

© by Claude Loullingen