Claude Loullingen
Let no grass grow under your feet. You are what you create.
Let no grass grow under your feet. You are what you create.
Projects around the Kuka robot VKR 200/2 and the controller KR C1

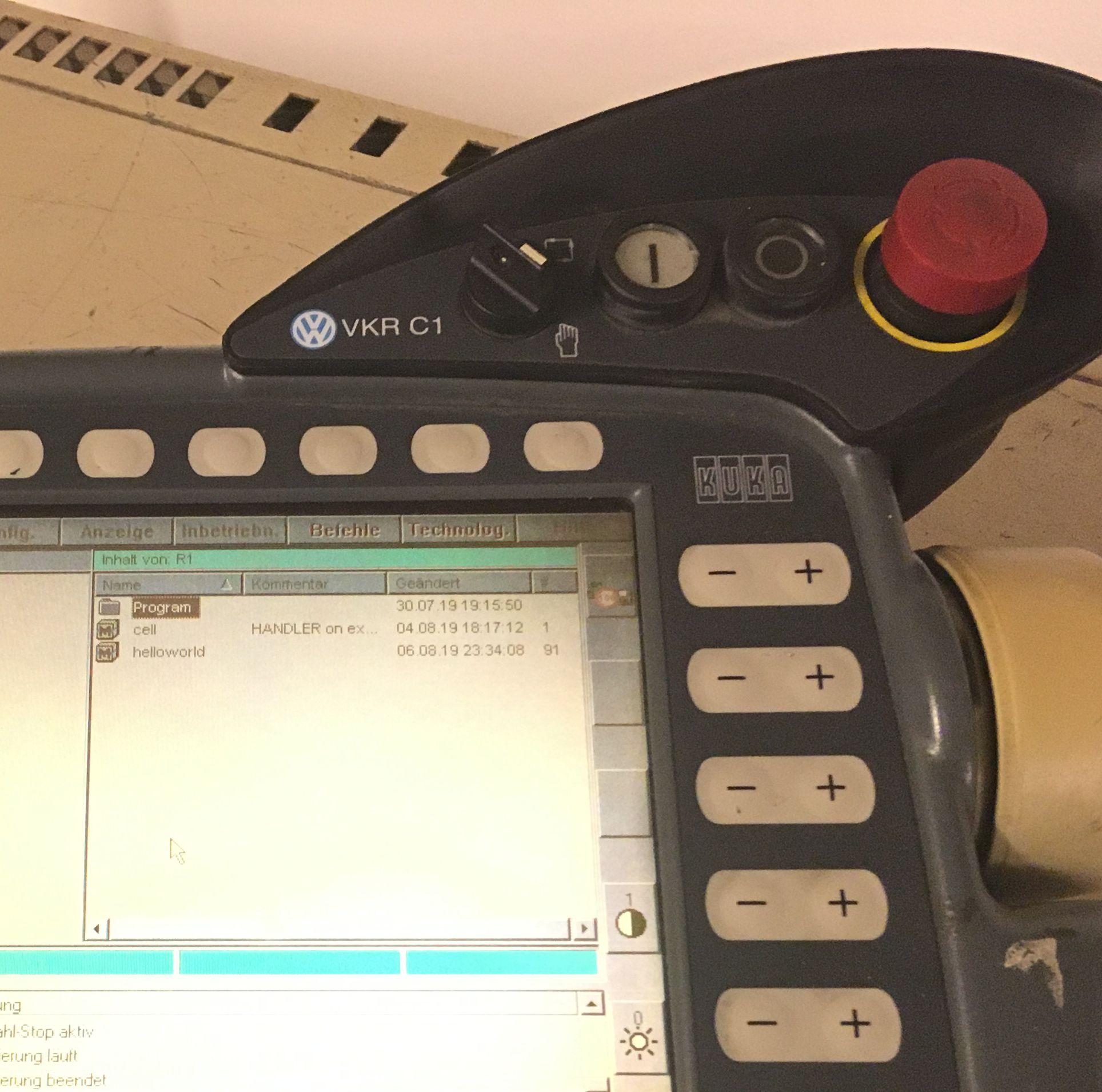
Startup KRC1
Putting a Kuka VKRC1 into operation and converting it into a KRC1
LED LCD
Converting the LCD backlight of the KCP from CCFL to LED

Automatic external
Automatic external mode
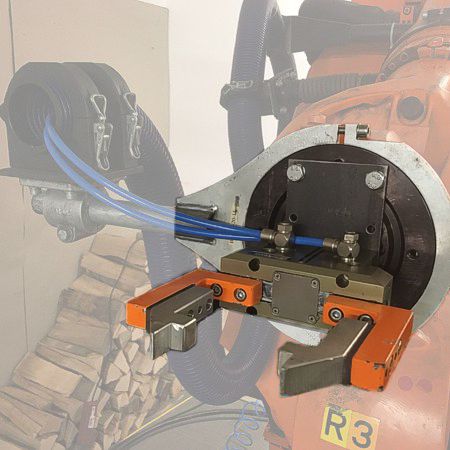
Gripper
Controlling a gripper with the KR C1

First programm
User programming of a VKR200/2 on a KRC1
Palettizing
Palettizing via expert programming
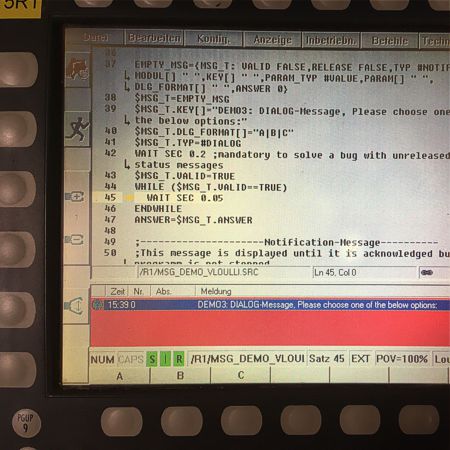
User messages
Reading data over the softkeys at run time
Fan control
Temperature-dependent fan control
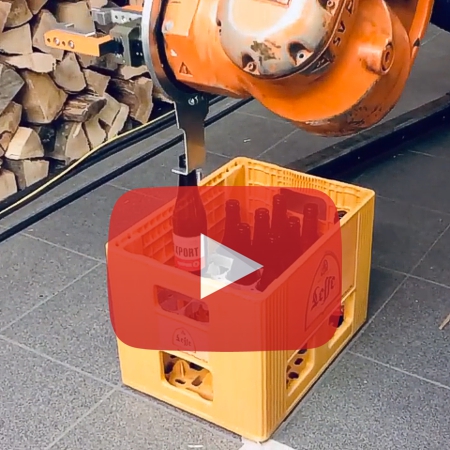
Prost v1.0
Fun with Kuka robot

Remote control
Send position via COM2 to KRC1
Prost v2.0
Object detection with OpenCV and online shop

PM6-600
PM6-600 Repair
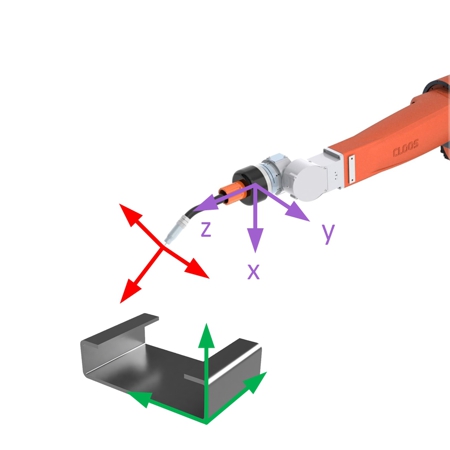
Kuka ABC/Fanuc WPR
Understand rotation angles

Fusion goes KRC1
Make a KRC1 program from an Autodesk Fusion 360 drawing

Instagram
Follow me
© by Claude Loullingen